


Startseite Know How Glossar
Modellbahn-ABC | Glossar

A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P | Q | R | S | T | U | V | W | X | Y | Z
>>> Lokdecoder, ABC-Bremsmodule
Das ABC-Verfahren basiert darauf, dass im Bremsabschnitt statt der "normalen" symmetrischen eine unsymmetrische Spannung am Gleis anliegt. Lokdecoder für das ABC-Bremsverfahren erkennen bei der Einfahrt in einen ABC-Bremsabschnitt diese unsymmetrische Gleisspannung und reduzieren daraufhin die
Fahrgeschwindigkeit mit der eingestellten Bremsverzögerung oder dem eingestellten Bremsweg.
Während sich die Lok im Bremsabschnitt befindet,
- können die Funktionen geschaltet werden,
- können die CVs des Decoders mittels Hauptgleis-Programmierung (PoM) geändert werden,
- kann die Fahrtrichtung der Lok geändert und damit die Lok rangiert oder in der Gegenrichtung aus dem Bremsabschnitt herausgefahren werden.
Sobald die Bremsstrecke aufgehoben wird, beschleunigt die Lok mit der eingestellten Anfahrverzögerung bis zur eingestellten Fahrstufe.
Prinzipbedingt ist die Bremsstrecke jeweils nur für eine Fahrtrichtung wirksam. Beim Überfahren der Trennstelle zwischen Normalstrecke und ABC-Bremsabschnitt treten keine Kurzschlüsse auf.
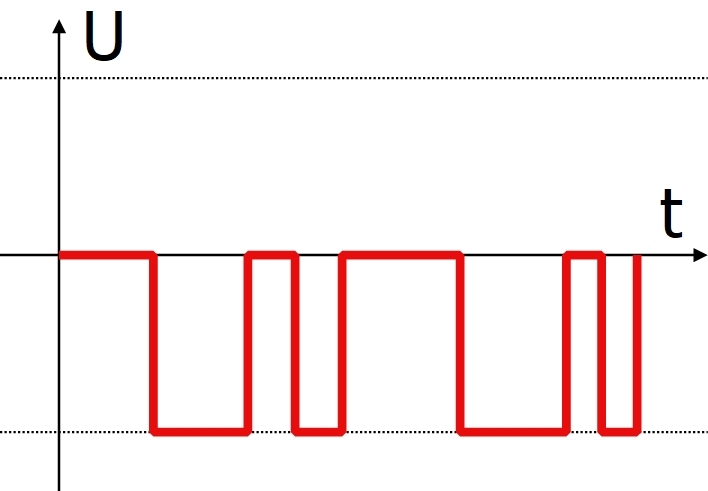
ABC-Bremsstrecke:Die normalerweise symmetrische Digitalspannung wird im Bremsabschnitt einseitig durch ein spezielles ABC-Bremsmodul reduziert, standardmäßig an der in Fahrtrichtung gesehen rechten Schiene. |
Symmetrische
|
Unsymmetrische
|
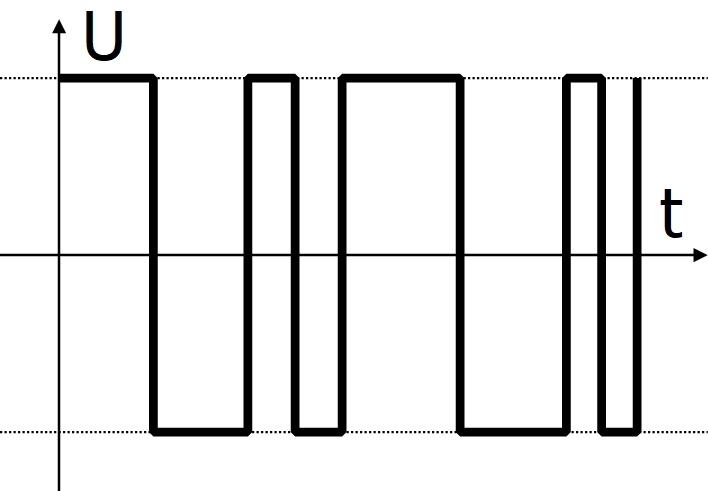
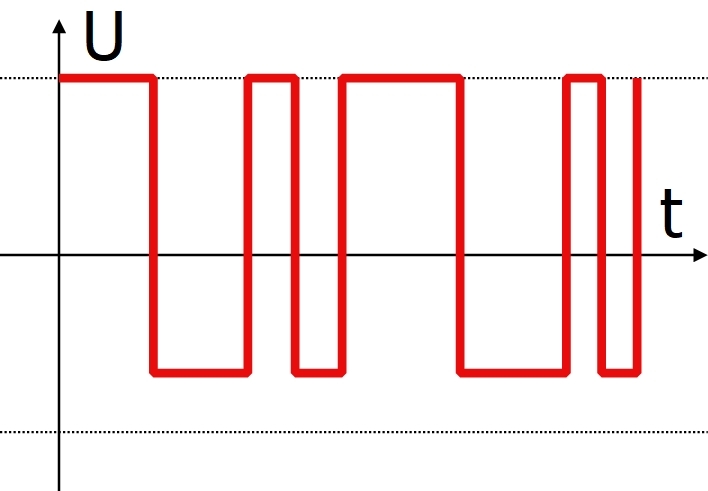
- Der Booster muss am Gleisausgang eine möglichst symmetrische Ausgangsspannung bereitstellen.
- Ein spezielles ABC-Bremsmodul reduziert für den Bremsabschnitt entweder den positiven oder den negativen Teil der Digitalspannung und erzeugt damit eine unsymmetrische Gleisspannung. Es wird jeweils ein Bremsmodul pro Bremsstrecke und Fahrtrichtung benötigt.
- Der Lokdecoder muss das Anliegen einer unsymmetrischen Gleisspannung erkennen und darauf mit der Reduzierung der Fahrgeschwindigkeit reagieren.
Automatischer Pendelzugbetrieb auf Basis des ABC-Verfahrens
Das ABC-Bremsverfahren kann für die Automatisierung des Pendelbetriebs zwischen zwei Endbahnhöfen genutzt werden. Dazu wird der Lokdecoder so programmiert, dass er nach dem Halt die Fahrtrichtung wechselt und die Lok dann in die Gegenrichtung zurückfährt. Neben einem Lokdecoder, der dieses Verfahren unterstützt, wird pro Fahrtrichtung jeweils ein ABC-Bremsmodul benötigt.
Abschaltstrom
>>> Booster
Bei einer Überschreitung des Abschaltstroms reagiert die Kurzschluss-Sicherung des Boosters, um den Booster, die Fahrzeuge und die Schienen vor Schäden zu schützen. Je nach Ausführung ist der Abschaltstrom des Boosters fest eingestellt (z.B. 3 A) oder kann individuell angepasst werden.
Der Abschaltstrom entspricht dem maximalen Ausgangsstrom des Boosters. Daher sind Booster mit einem hohen Ausgangsstrom für kleine Nenngrößen ungeeignet.
|
Nenngröße
|
Empfohlener Abschaltstrom
|
|
Z, N
|
2 A
|
|
TT, H0
|
2,5 bis 3 A
|
|
0, I und II
|
5 A
|
Der Abschaltstrom darf nicht höher sein als der maximale Strom des Trafos. Ist er höher als der maximale Strom des Trafos, kann der Booster einen Überstrom nicht erkennen und folglich auch den Strom nicht abschalten. In dieser Konstellation besteht Brandgefahr !
>>> Lokdecoder, Funktionsdecoder
Viele Fahrzeugdecoder können nicht nur im Digital-, sondern auch im Analogbetrieb eingesetzt werden, die Umstellung erfolgt bei modernen Decodern automatisch. Die Funktionsausgänge können analog nicht geschaltet werden. Sie können jedoch festlegen, welche Funktionen im Analogbetrieb ein- oder ausgeschaltet sein sollen.
Hinweis: Für den dauerhaften Einsatz in rein analogen Wechselstrom-Anlagen sind Lokdecoder nicht empfehlenswert. Die hohen Spannungsspitzen, die beim Senden des Umschaltimpulses auftreten, können langfristig die Bauteile beschädigen.
Anfahr- und Bremsverzögerung
>>> Lokdecoder
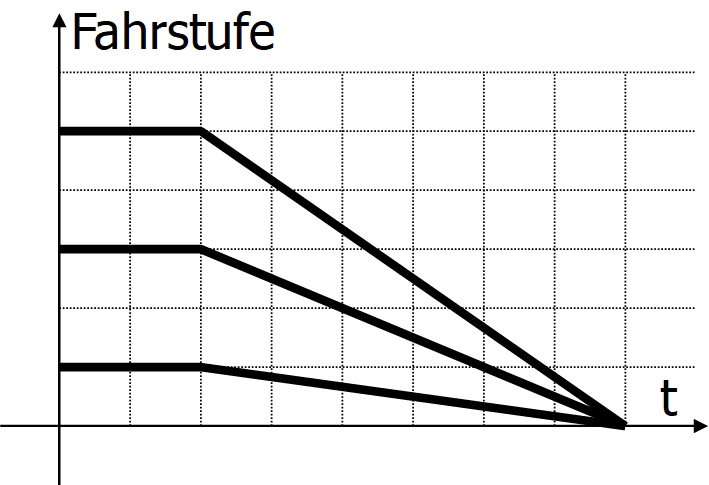
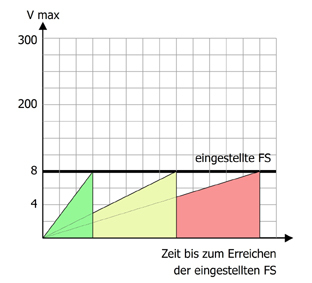 Die Anfahr- und Bremsverzögerung gibt vor, wieviel Zeit bis zum Erreichen der nächst höheren bzw. niedrigeren Fahrstufe vergeht. Sie wird getrennt für Anfahren und Bremsen definiert, so wird ein vorbildgerechtes Anfahr- und Bremsverhalten erzielt. Für Rangierfahrten kann die Anfahr- und Bremsverzögerung bei unseren Lokdecodern mit einer Funktionstaste ausgeschaltet werden.
Die Anfahr- und Bremsverzögerung gibt vor, wieviel Zeit bis zum Erreichen der nächst höheren bzw. niedrigeren Fahrstufe vergeht. Sie wird getrennt für Anfahren und Bremsen definiert, so wird ein vorbildgerechtes Anfahr- und Bremsverhalten erzielt. Für Rangierfahrten kann die Anfahr- und Bremsverzögerung bei unseren Lokdecodern mit einer Funktionstaste ausgeschaltet werden.
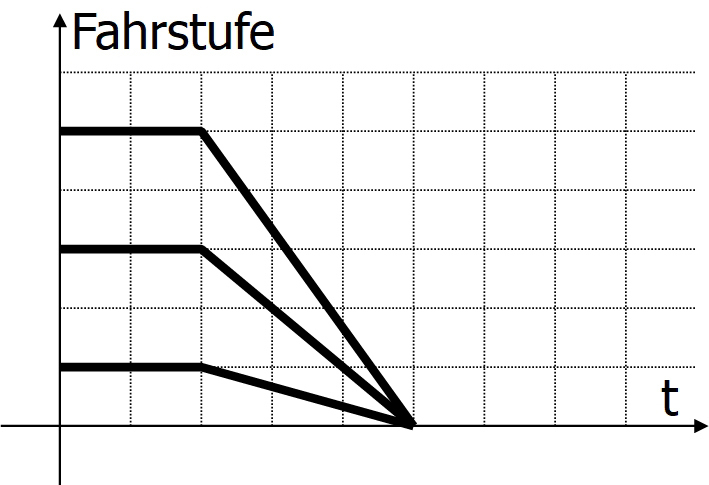
Bei aktiver Bremsverzögerung ist ein exakter Halt an Haltepunkten nicht möglich, da die Länge des Bremsweges von der Geschwindigkeit beim Auslösen des Bremsvorgangs abhängt. Dieses Problem lässt sich mit Lokdecodern lösen, für die ein konstanter Bremsweg eingestellt werden kann. Der Bremsweg ist dann unabhängig von der Fahrstufe beim Starten des Bremsvorgangs immer gleich lang ist.
Abbildung: Verschiedene Einstellungen für die Anfahrverzögerung.
Anfahr-und Höchstgeschwindigkeit
>>> Lokdecoder
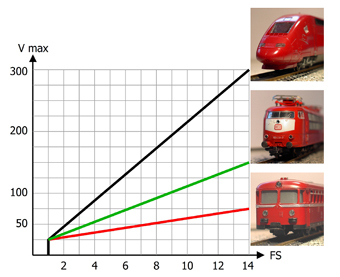 Durch Einstellung der Anfahr- und Höchstgeschwindigkeit werden die Lokdecoder an die indivduellen Motoreigenschaften und den Loktyp angepasst. So wird erreicht, dass die Lok bei Fahrstufe 1 gerade anfährt und bei der höchste Fahrstufe eine vorbildrechte Maximalgeschwindigkeit erreicht.
Durch Einstellung der Anfahr- und Höchstgeschwindigkeit werden die Lokdecoder an die indivduellen Motoreigenschaften und den Loktyp angepasst. So wird erreicht, dass die Lok bei Fahrstufe 1 gerade anfährt und bei der höchste Fahrstufe eine vorbildrechte Maximalgeschwindigkeit erreicht.
Abbildung: Lineare Geschwindigkeitskennlinien mit unterschiedlichen Höchstgeschwindigkeiten.
Anfahr-Kick
>>> Lokdecoder
Der 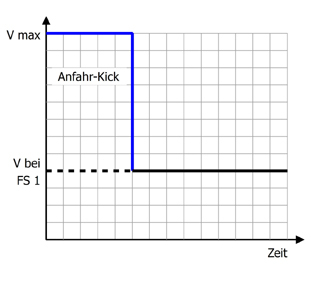 "Anfahr-Kick" bewirkt eine kurzzeitige Erhöhung der Motorspannung beim Anfahren. Dadurch wird das Losbrechmoment beim Anfahren überwunden. Die automatische Reduzierung der Spannung verhindert, dass die Loks mit zu hoher Geschwindigkeit losfahren.
"Anfahr-Kick" bewirkt eine kurzzeitige Erhöhung der Motorspannung beim Anfahren. Dadurch wird das Losbrechmoment beim Anfahren überwunden. Die automatische Reduzierung der Spannung verhindert, dass die Loks mit zu hoher Geschwindigkeit losfahren.
Anzahl der Lokadressen
>>> Lokdecoder, Funktionsdecoder
Wieviele Lokadressen Sie für die Ansteuerung der Fahrzeugdecoder nutzen können, ist von Ihrer Zentrale und dem gesendeten Datenformat abhängig. Möglich sind:
- DCC: 127 Basisadressen oder 10.239 erweiterte Adressen
- Motorola (I + II): 255
- mfx: mehr als 16.000. Die Adressen werden den Decodern von der Zentrale zugewiesen und spielen für den Anwender keine Rolle, da er die Loks über ihre Namen oder zugeordnete Piktogramme auswählt.
Unsere Fahrzeugdecoder können Sie im DCC-Format alternativ auf eine von 127 Basis- oder eine von 10.239 erweiterten Adressen einstellen. Im Motorola-Format können Sie eine von 255 Adressen verwenden.
Anzahl der Fahrstufen
>>> Lokdecoder, Funktionsdecoder
Die Anzahl der Fahrstufen, die Sie zur Ansteuerung der Decoder verwenden können, ist von Ihrer Zentrale und dem gesendeten Datenformat abhängig. Möglich sind:
- DCC: 14, 27, 28 oder 128
- Motorola (I + II): 14 oder 27 (bzw. 28)
- mfx: 128
Die Möglichkeit, Loks im Motorola-Format mit 27 bzw. 28 Fahrstufen anzusteuern, wurde erst nachträglich von einigen (Decoder-) Herstellern hinzugefügt. Für die technische Realisierung gibt es zwei Varianten:
- 27 "simulierte" Fahrstufen, d.h. die zusätzlichen Fahrstufen werden durch Hin- und Herschalten zwischen der nächst niedrigen und der nächst höheren Fahrstufe erzeugt. Die Anzahl der auf diese Weise erzeugten Fahrstufen bezeichnen wir mit "27 a" (andere Hersteller mit "27").
- 27 "echte" Fahrstufen, d.h. die zusätzlichen Fahrstufen werden durch eine entsprechende Erweiterung des Datenprotokolls erzeugt. Die Anzahl der auf diese Weise erzeugten Fahrstufen bezeichnen wir mit "27 b" (andere Hersteller mit "28").
Im DCC-Format können Sie die Fahrzeug-Decoder aus unserem Programm entweder mit 14, 28 oder 128 Fahrstufen betreiben. Hinweis: Wenn Sie Lok- oder Funktionsdecoder im DCC-Format ansteuern, muss die an der Zentrale eingestellte Anzahl der Fahrstufen mit der Einstellung in den CVs des Decoders übereinstimmen. Tun sie das nicht, wird die Beleuchtung beim Ändern der Fahrstufen an- und ausgeschaltet oder sie lässt sich gar nicht einschalten.
Im Motorola-Format können Sie unsere Lokdecoder außer mit den üblichen 14 auch mit 27 Fahrstufen ansteuern, vorausgesetzt die Zentrale unterstützt den 27-Fahrstufen-Modus (z.B. MasterControl).
Automatisierte Abläufe
>>> Lokdecoder
Die Steuerungssoftware im Lokdecoder ermöglicht die Automatisierung von Vorgängen und die Reduzierung komplexer Abläufe auf einen Tastendruck. Je nach Ausführung des Decoders können folgende Abläufe automatisiert werden:
- Geschwindigkeitsabhängige Dimmfunktion: Geschwindigkeitsabhängige Funktionen können automatisch bei Erreichen einer per CV definierten Fahrstufe geschaltet werden. Den Funktionsausgängen wird für die Fahrstufenbereiche unter- und oberhalb der definierten Fahrstufe jeweils eine individuelle Spannung zugeordnet. Damit lassen sich z.B. das Fernlicht ein- und ausschalten, die Führerstandsbeleuchtung regeln oder die Intensität des Dampfausstoßes beeinflussen.
- Rangierfunktion
- Sonderfunktionen für Fahrstufe 0: Durch Programmierung der Sonderfunktionen für Fahrstufe 0 können mehrere Funktionsausgänge und Funktionen gleichzeitig ein- oder ausgeschaltet werden, die sonst einzeln geschaltet werden müssten. Es können so z.B. beim Abstellen der Lok im BW mit einer Funktionstaste mehrere Beleuchtungen gleichzeitig geschaltet werden (Stirn- und Schlussbeleuchtungen, Führerstands- und Fahrwerksbeleuchtung).
- Pendelautomatik
- An- und Entkuppelautomatik
A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P | Q | R | S | T | U | V | W | X | Y | Z
BiDiB - der universelle Datenbus
>>> Digitalsteuerung, Rückmeldung
BiDiB® steht für BiDirektionaler Bus und ist ein Datenprotokoll, das die komplette Steuerung einer Modellbahn (Fahrzeuge, Weichen, sonstiges Zubehör) sowie die Übertragung von Rückmeldedaten regelt.
Die wesentlichen Merkmale:
- Über den BiDi-Bus können verschiedene stationäre Komponenten der Modellbahnsteuerung (z.B. digitale Steuergeräte, Booster, Zubehördecoder, Rückmelder) miteinander kommunizieren – und zwar in beiden Richtungen.
- BiDiB ist so konzipiert, dass die Komponenten sich weitestgehend selbsttätig im System konfigurieren und der Modellbahner mit der Konfiguration nichts zu tun hat – es sei denn, er will bewusst eingreifen.
- BiDiB entspricht dem aktuellen Stand der Technik.
- BiDiB wurde von einer Gruppe engagierter Hobby-Modellbahner, Software-Entwickler und Herstellern von Modellbahnsteuerungen ohne Gewinnerzielungsabsicht entwickelt. Für Komponenten, die über BiDiB miteinander kommunizieren, müssen keine Lizenzkosten entrichtet werden.
- Das Protokoll ist offen gelegt und steht allen Interessierten zur (lizenkostenfreien) Nutzung zur Verfügung. Komponenten verschiedener Hersteller können über den BiDi-Bus miteinander kommunizieren.
Konzeption einer BiDiB-Anlage:
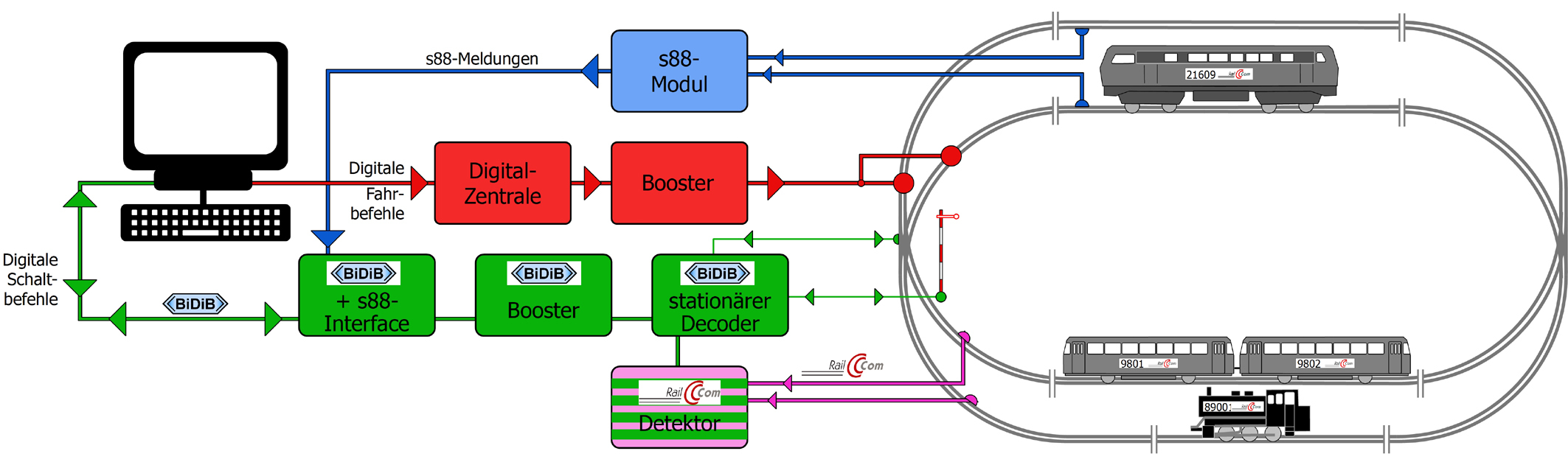
In (Teilen von) Anlagen, in denen BiDiB eingesetzt wird, läuft die Kommunikation zwischen PC und stationären Komponenenten getrennt von der Übertragung der Fahrbefehle.
Die s88-Meldungen werden im Beispiel über ein s88-BiDiB-Interface in den BiDi-Bus übertragen. Ein spezieller RailCom-Detektor überträgt die Meldungen der Fahrzeugdecoder über den BiDi-Bus an den PC.
Weitere Informationen zu BiDiB: www.bidib.org
Blink-LEDs
>>> Modellbahn-Elektronik
Blink-LEDs haben eine kleine Steuerungs-Elektronik an Bord, die dafür sorgt, dass die LED abwechselnd ein- und ausgeschaltet wird. Die Frequenz kann nicht beeinflusst werden. Auf Grund von Toleranzen ist die Frequenz auch bei LEDs des gleichen Typs nicht immer gleich. Wie alle LEDs müssen sie über einen Vorwiderstand betrieben werden, der von der Höhe der Versorgungsspannung und der Zahl der in Reihe geschalteten LEDs abhängt.
Blink-LEDs sind in verschiedenen Bauformen erhältlich, z.B.
- als bedrahtete 1,8 mm- oder 3 mm-LEDs
- als SMD LEDs Bauform 0805
Sie eignen sich z.B. als Warnleuchten in Fahrzeugen oder als Einfach-Blinker, jedoch nicht als Wechselblinker.
Booster
>>> Digitalsteuerung
Jede digitale Anlage braucht mindestens einen Booster (oder Leistungsverstärker, wie manche Hersteller ihn nennen). In diversen Digitalzentralen ist bereits ein Booster integriert, der für die Versorgung einer kleineren Anlage ausreicht. Spätestens dann, wenn der Digitalbetrieb erweitert wird, werden Booster in Form externer Geräte erforderlich. Wird eine Zentrale eingesetzt, in der kein Booster integriert ist, ist ein externer Booster zwingend erforderlich (z.B. bei Tams MasterControl).
Booster haben im wesentlichen drei Aufgaben:
- Den Strom liefern, der zum Betrieb der digital angesteuerten Loks und Weichen, aber auch von sonstigen (digitalen) Verbrauchern benötigt wird.
- Die Spannung ans Gleis bringen, so dass die digitalen Fahr- und Schaltbefehle bei allen Fahrzeug- und Zubehördecodern ankommen.
- Im Falle eines Kurzschlusses auf der Anlage (z. B. beim Entgleisen eines Fahrzeugs) dafür sorgen, dass der Strom abgeschaltet wird und Schäden an den Schienen und den Fahrzeugen verhindert werden.
Geregelte und ungeregelte Booster:
Bei geregelten Booster ist die Gleisspannung am Ausgang konstant. Je nach Ausführung des Boosters ist sie entweder auf einen Wert fest eingestellt (z.B. 18 V) oder kann individuell angepasst werden.
Beim Einsatz ungeregelter Booster hängt die Gleisspannung von der Nennspannung des Trafos und vom aktuellen Stromverbrauch ab. Daher variieren beim Einsatz ungeregelter Booster die Fahrgeschwindigkeiten der Loks und die Helligkeit der Beleuchtungen infolge von Spannungsschwankungen. Wesentlicher Nachteil ungeregelter Booster ist, dass die anliegende Spannung häufig höher ist als für die Nenngröße empfohlen, selbst wenn für die Nenngröße übliche Komponenten zum Einsatz kommen. Daher empfehlen wir grundsätzlich den Einsatz geregelter Booster.
Tipp: Technische Grundlagen von Boostern als Infothek-Blatt zum kostenlosen Download.
Booster-Schnittstellen
>>> Booster
DCC-konforme und Märklin-kompatible Booster-Schnittstellen
Für den Anschluss von Boostern an Digitalzentralen für das Motorola- und / oder das DCC-Format sind gebräuchlich:
- 3-polige "DCC-konforme" und
- 5-polige "Märklin-kompatible" Booster-Schnittstelle
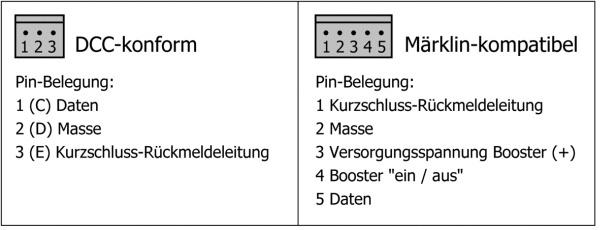
Die beiden Schnittstellen unterscheiden sich nicht nur äußerlich voneinander, auch die am Boosterausgang der Zentrale anliegenden Signale sind verschieden. Booster mit unterschiedlichen Schnittstellen können daher nicht am selben Boosterausgang einer Digitalsteuerung angeschlossen werden.
Werden Zentralen mit integriertem Booster zum Fahren eingesetzt, sollten zur Versorgung weiterer Boosterabschnitte mit Fahrstrom Booster des gleichen Typs verwendet werden.
Unsere Booster haben (wie die meisten Booster) eine DCC-konforme Boosterschnittstelle. Sie können einen DCC-konformen Booster mit Zentralen mit Märklin-kompatibler Schnittstelle einsetzen, indem Sie den Booster an den Gleisausgang der Zentrale (statt an die Märklin-kompatible Booster-Schnittstelle) anschließen. Der in der Zentrale integrierte Booster sollte dann grundsätzlich nicht gemeinsam mit externen Boostern für die Versorgung der Anlage mit Fahrstrom eingesetzt werden. Der in der Zentrale integrierte Booster kann sinnvoll zum Schalten der Zubehördecoder in einem eigenen Boosterkreis eingesetzt werden.
Sowohl über die DCC-konforme als auch über die Märklin-kompatible Boosterschnittstelle können Daten im DCC- und im Motorola-Format übertragen werden. Auch die Schalt- und Steuerbefehle im mfx-Format werden über diese Schnittstellen übertragen, jedoch nicht die Rückmeldungen.
Sonstige Booster-Schnittstellen
Lokmaus und Multimaus: Die von ROCO konzipierte Schnittstelle ist technisch eine DCC-Boosterschnittstelle. Durch die Verwendung einer speziellen Anschlussbuchse ist der Einsatz von Boostern, die nicht über einen entsprechenden Stecker verfügen (also von Boostern anderer Hersteller) jedoch schwer möglich.
mfx-Boosterschnittstelle: Diese sind für den Anschluss von mfx-tauglichen Boostern entwickelt worden und haben neben den eigentlichen Boosteranschlüssen einen weiteren Anschluss für die mfx-Rückmeldeleitung. Anmerkung: Die meisten mfx-Zentralen haben auch eine "normale" Boosterschnittstelle, an die Standard-Booster, die nicht mfx-tauglich sind, angeschlossen werden.
LocoNet-Boosterschnittstelle: Über die Schnittstelle wird der Booster in eine über das LocoNet gesteuerte und überwachte Digitalsteuerung eingebunden. Die Schnittstelle ist technisch eine DCC-konforme Boosterschnittstelle, die zusätzliche Anschlüsse hat, über die der Booster mit einer LocoNet-Digitalzentrale konfiguriert, ein- und ausgeschaltet und überwacht werden kann. Wenn diese Möglichkeiten nicht genutzt werden sollen, kann auch ein Standard-DCC-konformer Booster an die LocoNet-Boosterschnittstelle angeschlossen werden.
BiDiB-Boosterschnittstelle: In einer über BiDiB gesteuerten und überwachten Anlage fungiert der Booster als BiDiB-Knoten. Der Anschluss erfolgt – wie bei BiDiB üblich - über Patchkabel (RJ 45). Über die Schnittstelle können Daten bidirektional übertragen werden, also sowohl Schalt- und Steuerbefehle als auch Rückmeldungen vom Booster (z.B. aktuelle Betriebswerte) als Grundlage für das Booster-Management der PC-Steuerung.
Tipp: Auswahl, Anschluss und Einsatz von Boostern als Infothek-Blatt zum kostenlosen Download.
>>> Lokdecoder
Das Bremsverfahren, das z.B. von Märklin verwendet wird ("Märklin-Bremsstrecke"), basiert darauf, dass im Bremsabschnitt statt einer abwechselnd positiven und negativen Spannung nur noch eine rein positive oder negative Spannung am Gleis anliegt. Um Kurzschlüsse bei der Einfahrt in den Bremsabschnitt zu verhindern, muss zwischen "Normalstrecke" und Bremsabschnitt ein zusätzlicher Übergangsbereich eingefügt werden, der beim Einsatz in Gleichspannungsanlagen eine komplette Zuglänge lang sein muss.
Lokdecoder, die auf das Anliegen einer reinen Gleichspannung reagieren, reduzieren bei der Einfahrt in die Bremsstrecke automatisch die Fahrgeschwindigkeit mit der eingestellten Bremsverzögerung oder dem eingestellten Bremsweg. Im Bremsabschnitt bleibt der Status der geschalteten Funktionen erhalten. Anders als beim ABC-Bremsverfahren
- können in der Bremsstrecke die Funktionen nicht geschaltet werden,
- können die CVs des Decoder nicht geändert werden,
- kann die Fahrtrichtung der Lok nicht geändert werden.
Sobald die Bremsstrecke aufgehoben wird, beschleunigt sie mit der eingestellten Anfahrverzögerung bis zur eingestellten Fahrstufe.
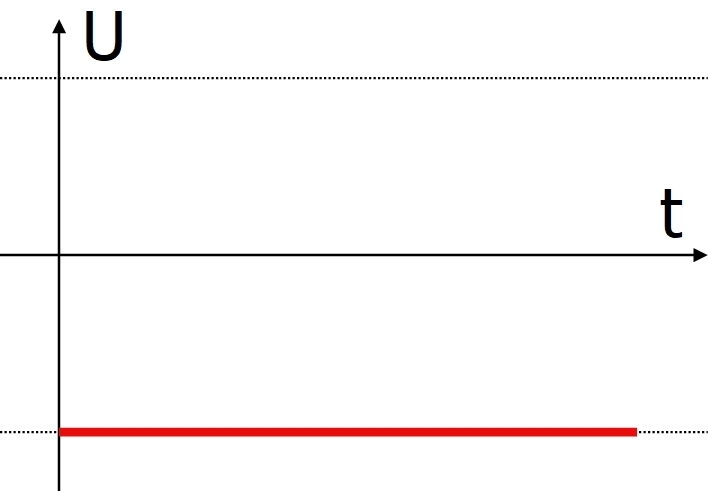
"Märklin-Bremsstrecke":Die normalerweise symmetrische Digitalspannung wird im Bremsabschnitt durch ein spezielles Bremsmodul auf eine reine Gleichspannung reduziert. Um Kurzschlüsse zu verhindern, muss zwischen Normal- und Bremsstrecke ein Übergangsbereich eingefügt werden. |
Symmetrische
|
Unsymmetrische
|
Reine Gleichspannung
|
A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P | Q | R | S | T | U | V | W | X | Y | Z
DCC-A
>>> Digitalsteuerung, Decoder
DCC-A ist ein automatisches Anmeldeverfahren für das DCC-Format, das in der RailCommunity-Norm RCN-218 beschrieben wird. Voraussetzung für die Nutzung ist die Verwendung einer Digitalzentrale und von Decodern, die das Verfahren unterstützen.
Beispiel: Übertragung der Parameter von Fahrzeugdecodern im DCC-A Anmeldeverfahren
Sofort nach dem Aufgleisen des Fahrzeugs werden die wesentlichen Eigenschaften des Decoders an die Digitalzentrale übertragen, sind dort direkt verfügbar und können an individuelle Bedürfnisse angepasst werden.
-
Produktbezeichnung, Hersteller, UID, Soft- und Hardware-Stand des Decoders werden angezeigt.
-
Die Vergabe von Adressen und die Zuweisung von Funktionen ist wesentlich vereinfacht.
-
Sollte sich bereits ein Decoder mit gleicher Adresse auf der Anlage befinden, weist die Zentrale dem Decoder automatisch eine neue Adresse zu. Die alte Adresse bleibt erhalten.
-
Dem Decoder können ein (Fahrzeug-) Name und ein Symbol des Fahrzeugs zugeordnet werden, um das Fahrzeug leichter identifizieren zu können. Das Symbol für "EMMA" sieht z.B. so aus:

-
Den Funktionen können spezifische Icons zugeordnet werden, aus denen ersichtlich ist, was sie schalten (z.B. Stirnbeleuchtung, Innenbeleuchtung, Rangiergang).
Decoder-Schnittstellen
>>> Lokdecoder
Viele neuere Loks sind werkseitig mit einer Schnittstelle ausgerüstet. Durch Einsatz eines Decoders mit passender Schnittstelle sparen Sie das Auftrennen der Anschlüsse und Lötarbeiten an der Lok. Bei älteren Loks können Sie prüfen, ob sich eine Schnittstelle nachrüsten lässt, das erleichtert einen späteren Decoderwechsel.
Die Zunahme der Zahl der Lokfunktionen (vor allem der Soundfunktionen) in den letzten 10 Jahren hat zur Entwicklung mehrerer neuer Schnittstellen geführt. Viele der Schnittstellen sind zwischenzeitlich genormt. Loks und Decoder nach gleicher Norm passen zusammen, auch wenn sie nicht vom gleichen Hersteller sind. Anders ist die Situation bei Hersteller-Standards (z.B. 21MTC-M und mTc14), die nicht von den Verbänden genormt sind.
Modularer Aufbau: Die PluX- und die PluG-Schnittstelle sind so aufgebaut, dass die Grundversion mit der kleinsten Pin-Anzahl durch die Anordnung zusätzlicher Pins an den Schmalseiten erweitert wird. Sie können daher einen PluX12- oder PluX16-Decoder in eine PluX22-Schnittstelle stecken und damit die Grundfunktionen ansteuern. Da lokseitig nicht immer alle Pins der "großen" Schnittstellen belegt sind, muss das nicht zwingend Einschränkungen in der Funktionalität zur Folge haben.
|
Logo
|
Bezeichnung
|
Nenn-
größen
|
Anschlüsse
|
Morop-Norm
|
|
RCN(Rail-Community-Norm)
|
||||
 |
6-polig
|
N, TT (H0)
|
Licht vorn / hinten
|
NEM 651
|
|
----
|
||||
 |
8-polig
|
H0
|
Licht vorn / hinten
Zusatzfunktionen: 1
|
NEM652
|
|
----
|
||||
 Abb.: PluX12
|
PluX12
PluX16
PluX22
|
(N), TT, H0
H0
H0
|
Licht vorn / hinten
Lautsprecher
PluX12, PluX16: 2 Zusatzfunktionen
PluX22: 7 Zusatzfunktionen
|
NEM 658
|
|
RCN-122
(nicht PluX12)
|
||||
|
|
mTc14
|
N
|
|
nicht genormt
|
 |
21MTC
|
H0
|
Licht vorn / hinten
Lautsprecher
6 Zusatzfunktionen
(2 verstärkte Ausgänge
+ 4 Ausgänge mit Logikpegel)
|
NEM 660
|
|
RCN-121
|
||||
|
|
21MTC-M
|
H0
|
Licht vorn / hinten
Lautsprecher
6 Zusatzfunktionen (4 verstärkte Ausgänge
+ 2 Ausgänge mit Logikpegel)
Hinweis:
Äußerlich ist diese Schnittstelle identisch mit der 21MTC-Schnittstelle nach NEM 660 / RCN-121.Die Versionen unterscheiden sich jedoch hinsichtlich
der Ausführung der Ausgänge AUX3 und AUX4.
|
Hausstandard Märklin und Trix,
nicht genormt
|
|
|
Next18
Next18-S
|
N, TT (H0)
|
Licht vorn / hinten
Next18: max. 6 Zusatzfunktionen
Next18-S (Sound): Lautsprecher, max. 4 Zusatzfunktionen
|
NEM 662
|
|
RCN-118
|
||||
|
|
PluG-16
PluG-20
PluG-20S
PluG-S
PluG-30DS
|
0, I, II, G
|
Licht vorn / hinten
PluG-16: 7 Zusatzfunktionen
PluG-20: 12 Zusatzfunktionen
PluG-30: 17 Zusatzfunktionen
Versionen S (Sound) und DS (Dual-Sound): Lautsprecher
|
NEM 663
|
|
RCN-123
|
||||
 |
SUSI-
Schnitt-stelle
|
alle
|
für den Anschluss von Erweiterungsmodulen ("Slaves", z.B. Sound- und Funktionsmodulen) an Hauptmodule ("Master", z.B. Lok- und Funktionsdecoder).
Über die SUSI-Schnittstelle werden die Erweiterungsmodule wie ein Teil des Hauptmoduls programmiert und angesteuert. |
RCN-600
|
>>> Digitalsteuerung
Das Digitalformat ist die "Sprache", in der die Digitalzentrale ihre Befehle an die Decoder sendet. Seit dem Beginn der Digitalisierung in den 1980er Jahren wurden verschiedene Formate entwickelt. Davon sind heute die folgenden Formate gebräuchlich:
DCC (Digital Command Control):
Für das ursprünglich von der Firma Lenz entwickelte Datenformat wurden bereits in den 1980er Jahren unter Federführung der NMRA (der US-amerikanischen National Model Railroad Association) von europäischen und nordamerikanischen Modellbahn-Herstellern Standards festgelegt. Heute werden für Europa die Standards von der RailCommunity (dem Verband der Hersteller Digitaler Modellbahnprodukte e.V.) gepflegt und weiterentwickelt. DCC-Digitalkomponenten werden heute von sehr vielen Herstellern für alle Nenngrößen angeboten.
Motorola (I und II):
Das Format wurde 1985 von Märklin entwickelt und wurde bis zur Einführung von mfx im Jahr 2005 für die Digitalkomponenten von Märklin verwendet. Wegen der großen Verbreitung von Märklin-Digitalkomponenten aus der Zeit vor 2005 ist das Format noch immer vielfach in Gebrauch.
mfx, M3 und M4:
2005 stellte Märklin mfx als Nachfolger für das veraltete und nicht mehr entwicklungsfähige Motorola-Format vor. Aus rechtlichen Gründen konnten zunächst nur wenige Hersteller (Märklin und ESU) Komponenten anbieten, die die Möglichkeiten des Formats ausnutzten (d.h. einschließlich automatischer Anmeldung durch die Fahrzeugdecoder). ESU entwickelt das Format mittlerweile eigenständig unter der Bezeichnung M4 weiter.
Wir haben für unser Digitalsystem EasyControl das Format M3 entwickelt, mit dem es möglich ist, mfx-Fahrzeug-Decoder anzusteuern. Die automatische Anmeldung ist mit EasyControl nicht möglich.
2019 hat Märklin das Protokoll offengelegt und anderen Herstellern die Nutzung ermöglicht. Wir werden voraussichtlich ab 2021 mfx-Decoder anbieten. Weitere Informationen zu mfx...
Im Gegensatz zu anderen Digitalprotokollen sind für das mfx-Protokoll derzeit keine Befehle zur Ansteuerung von Zubehördecodern definiert (Stand:10/2019). Stationäre Decodern werden daher entweder im Motorola- oder im DCC-Format geschaltet.
Selectrix:
Das Format wurde ursprünglich von der Firma Trix entwickelt und unterscheidet sich technisch grundlegend von anderen Digitalformaten. Da es für dieses Format bereits frühzeitig Fahrzeugdecoder mit kleinen Abmessungen gab, wurde es vor allem für Modellbahnen der Nenngröße N eingesetzt. Für das Format gibt es nur wenige Anbieter. Da wir keine Komponenten für dieses Format anbieten und nur selten Selectix gemeinsam mit anderen Digitalformaten zum Einsatz kommt, gehen wir in unseren Informationen nicht näher auf dieses Format ein.
Die meisten Digitalprodukte aus unserem Lieferprogramm sind multiprotokollfähig, sie senden bzw. "verstehen" die beiden am weitesten verbreiteten Digitalformate: das DCC- und das Motorola- (kurz: MM) Format. Im Betrieb erkennen unsere Fahrzeugdecoder automatisch, in welchem Format sie angesteuert werden.
>>> Digitalsteuerung
Seit dem Beginn der Digitalisierung von Modellbahnanlagen haben sich verschiedene Protokolle etabliert, die Rückmeldungen von der Anlage oder den Decodern zur Digitalzentrale oder zu speziellen Detektoren erzeugen. Insbesondere in PC-gesteuerten Anlagen sind Rückmeldungen von Bedeutung, wenn Abläufe in Abhängigkeit von bestimmten Zuständen automatisiert werden sollen. Beispiele für digitale Rückmeldeprotokolle sind:
- RailCom: Weiterentwicklung des DCC-Protokolls, das die Rückmeldung von Fahrzeug- Decoder zur Zentrale / Detektor ermöglicht
- RailCom plus: Erweiterung von RailCom, das die automatische Anmeldung der Decoder bei der Zentrale ermöglicht
- mfx: Teil des mfx-Formates. Bis heute wird es ausschließlich genutzt, um die Fahrzeug-Decoder automatisch bei der Zentrale anzumelden.
- s88: vor allem in Verbindung mit PC-Steuerung weit verbreitet. Meldet, ob ein Eingang des Rückmeldemoduls offen oder geschlossen ist und wird vor allem eingesetzt, um die Belegung von Gleisabschnitten zurückzumelden.
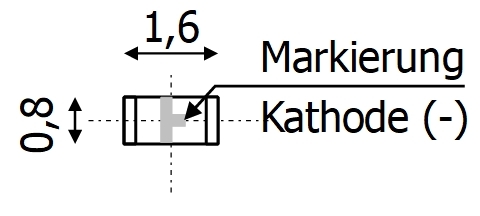
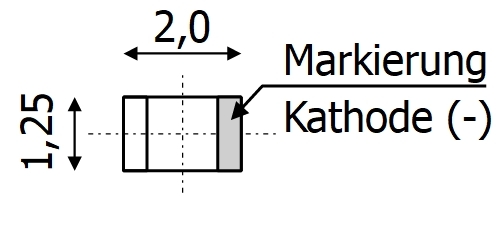
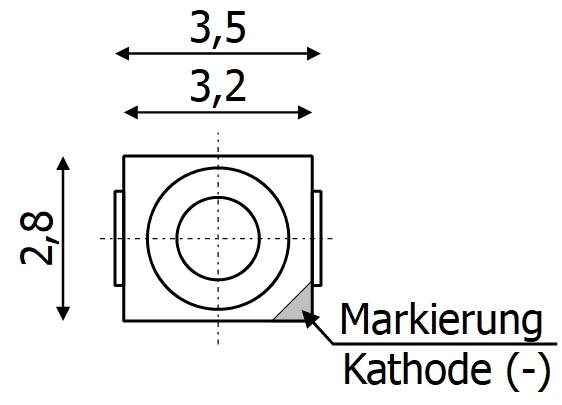
Duo-LEDs
>>> Modellbahn-Elektronik
Duo-LEDs vereinen zwei verschiedenfarbige LED-Chips in einem Gehäuse und leuchten – je nach Ansteuerung – in der einen oder der anderen Farbe oder auch in einer Mischfarbe. Folgende Typen sind gebräuchlich:
|
3-Bein-LEDs
mit gemeinsamer
Kathode (-)
|
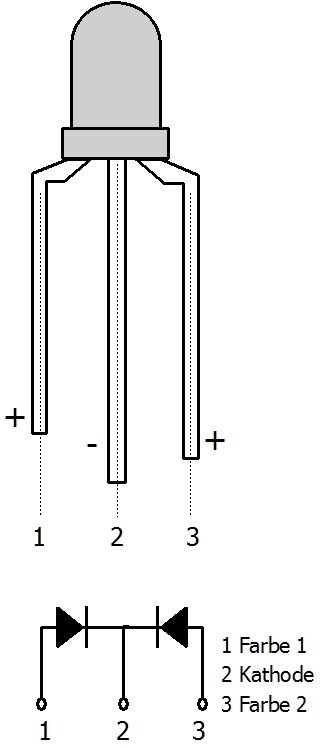
3-Bein-LEDs
mit gemeinsamer
Anode (+)
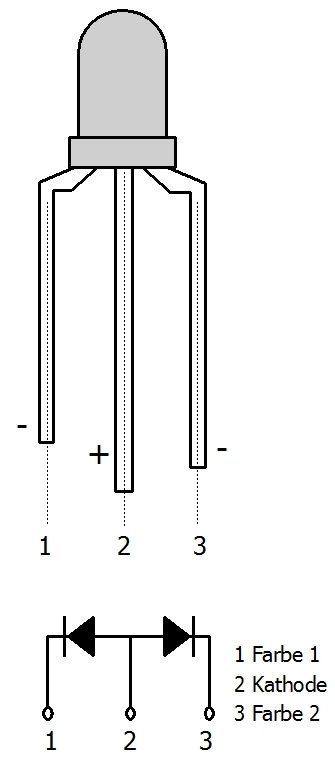
-----------------------------------Je nachdem, an welcher Kathode die Spannung anliegt, leuchtet die LED in der einen oder anderen Farbe. Sind beide Kathoden gleichzeitig mit der Spannungsquelle verbunden, entsteht ein Mischlicht. Bei dieser Bauform ist das längste Beinchen die Anode. Diese seit einiger Zeit erhältliche LED-Form kann direkt an die Funktionsausgänge eines Fahrzeugdecoders angeschlossen werden.
|
2-Bein-LEDs
(bipolar)
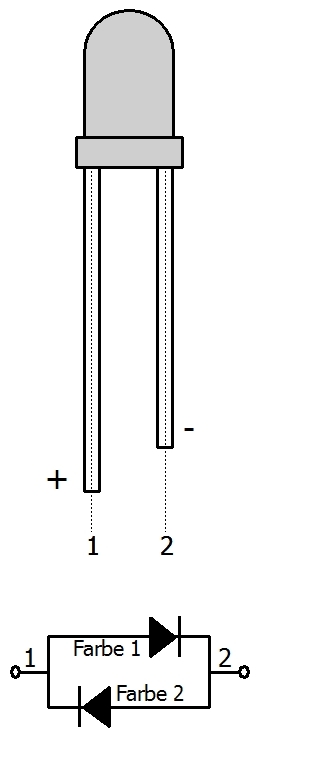
-----------------------------------Je nach Polung leuchtet die LED entweder in der einen oder der anderen Farbe. Um ein Mischlicht zu erzeugen, muss die LED mit Wechselspannung angesteuert werden. Durch die verschieden langen Anschlüsse wird gekennzeichnet, welche Farbe bei der einen oder anderen Durchflussrichtung leuchtet. Der Anschluss an die Ausgänge eines Fahrzeugdecoders ist etwas trickreich, da die LED ja nur zwei Anschlüsse hat, die mit drei Decoderanschlüssen verbunden werden müssen.
|
A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P | Q | R | S | T | U | V | W | X | Y | Z
>>> Booster, Fahrzeug-Decoder, Pufferschaltungen
geregelt in RailCommunity-Norm RCN 530
Einschaltstrom und Kurzschluss-Abschaltung der Booster
Die Summe der Ladeströme von Pufferkondensatoren auf Fahrzeugdecodern (vor allem von Sound-Decodern) und zusätzlichen externen Stützelkos oder Pufferschaltungen kann beim Einschalten der Anlage so hoch werden, dass die Kurzschluss-Abschaltung der Booster unmittelbar reagiert. Damit wird die Inbetriebnahme der Anlage bei aktiver Kurzschluss-Abschaltung schwierig. Durch verschiedene Maßnahmen an Boostern, Decodern und Pufferschaltungen kann das verhindert werden.
Booster werden dazu so ausgelegt, dass sie nach dem Einschalten für eine kurze Zeit (max. 500 mSek.) einen erhöhten Strom liefern (max. das 3-fache des eingestellten maximalen Stroms). Diese Zeit reicht, um Pufferkondensatoren und Stützelkos aufzuladen. Booster erkennen, dass Pufferkondensatoren geladen werden und kein Kurzschluss vorliegt z.B. daran, dass die Spannung am Gleis ansteigt und der Strom nach kurzer Zeit wieder sinkt. Ist das nicht der Fall, reagiert die Kurzschluss-Abschaltung des Boosters (weil dann von einem "echten" Kurzschluss auszugehen ist).
Bei Fahrzeugdecodern mit Puffer-Kondensatoren und externen Pufferschaltungen können verschiedene Maßnahmen ergriffen werden, um beim Laden der Puffer eine Aktivierung der Kurzschluss-Abschaltung des Boosters zu verhindern:
- Begrenzung des Ladestroms nach dem Einschalten der Anlage
- Begrenzung des Ladestroms nach kurzen Stromunterbrechungen oder nach einer RailCom-Lücke
- zeitlich verzögerter Beginn des Ladevorgangs für die verschiedenen Decoder / Pufferschaltungen nach dem Einschalten der Anlage. Dabei wird der Ladevorgang zufällig in Abhängigkeit von Parametern wie z.B. Adresse oder eindeutige Decoder-ID oder zufällig nach einem Fahrbefehl gestartet.
- Unterbrechung des Ladevorgangs bei Unterschreitung einer Gleisspannung von min. 8 V
Einschaltstrom und Programmierung von Fahrzeug-Decodern
Das Programmieren von Fahrzeug-Decodern auf dem Programmier-Gleis ist bei aktiver Pufferschaltung unmöglich, da dazu alle Stromverbraucher ausgeschaltet werden müssen. Nur so ist das Senden von Rückantworten des Decoders an die Zentrale und das Auslesen der eingestellten Werte möglich. Ladeschaltungen werden daher beim Programmieren auf dem Programmier-Gleis ausgeschaltet.
EasySound
>>> Fahrzeug- und Zubehördecoder
A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P | Q | R | S | T | U | V | W | X | Y | Z
Fahrsound
>>> Lokdecoder, Funktionsdecoder
--> Sounddecoder | Fahrsound
>>> Lokdecoder, Funktionsdecoder
Unter "Function Mapping" versteht man die Möglichkeit, den Ausgängen eines Fahrzeugdecoders nach Bedarf eine oder mehrere Funktionstasten zuzuordnen.
Die Zahl der Funktionen, die Sie schalten können, hängt vom Datenformat, vom Decoder und von der Zentrale ab. Maximal mögliche Funktionen:
- DCC: F0 bis F28 (oder bis zu 32767 so genannte binary states)
- Motorola: F0 bis F4
- mfx: F0 bis F15
Bei unseren Fahrzeugdecodern können Sie im DCC-Format F0 bis F12 oder F28 verwenden. Im Motorola-Format können Sie neben den Funktionstasten F0 bis F4 bei den meisten Decodern über eine 2. Adresse auch die Tasten F5 bis F9 einsetzen.
Function Mapping nach RCN-227
Die im Dezember 2018 von der RailCommunity verabschiedete Norm beschreibt ein Verfahren für das DCC-Protokoll, das die Zuordnung von zu 32 Funktionen zu maximal 24 Ausgängen ermöglicht. Das Verfahren ist so gestaltet, dass das Function Mapping auch bei einer großen Zahl von Funktionen und Ausgängen übersichtlich bleibt und die Konfiguration eines Fahrzeugdecoders auch ohne Einsatz spezieller Konfigurationsprogramme möglich ist.
Jeder Funktion können dabei jeweils getrennt für Vorwärts- und Rückwärtsfahrt einer oder mehrere Ausgänge zugewiesen werden. Zusätzlich besteht die Möglichkeit, den Funktionen eine andere Funktion als "AUS"-Schalter zuzuordnen. Mit dieser Art des Function Mapping können spezielle Funktionsweisen realisiert werden, z.B.:
- Fahrtrichtungsabhängiges Schalten.
- Rangierlicht: Beim Umschalten in den Rangierbetrieb werden gleichzeitig die Rangierlok-Signale ein- und die Signale für den Normal-Betrieb ausgeschaltet.
- Ausschalten des Lok-Schlusssignals bei angehängten Waggons.
>>> Digitalsteuerung
Funktionsdecoder sind ebenso wie Lokdecoder Fahrzeugdecoder und empfangen die digitalen Schaltbefehle, die von der Digitalzentrale an ihre (Lok-) Adresse gesendet werden. Im Gegensatz zu Lokdecodern können sie jedoch keinen Motor, sondern nur die an die Funktionsausgänge angeschlossenen Zusatzgeräte (z.B. Beleuchtungen) steuern.
Sie werden z.B. eingesetzt
- in Steuerwagen, um die vordere und hintere Beleuchtung fahrtrichtungsabhängig zu schalten
- als Ergänzung von Lokdecodern, wenn die Zahl oder der Strom der Funktionsausgänge des Lokdecoders nicht ausreichen, um alle Zubehörgeräte zu schalten. In diesem Fall ist es meistens sinnvoll, den Funktionsdecoder auf die gleiche Adresse einzustellen wie den Lokdecoder.
A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P | Q | R | S | T | U | V | W | X | Y | Z
Galvanische Trennung
Die galvanische Trennung (oder galvanische Entkopplung) bewirkt eine elektrische Trennung von zwei Stromkreisen, zwischen denen Informationen (Signale) ausgetauscht werden sollen. Die elektrische Leitung wird dabei durch Bauteile wie Optokoppler oder Relais unterbrochen.
In Modellbahnanlagen ist eine galvanische Trennung zwischen Digitalsystem und Schienen grundsätzlich sinnvoll. Digitalsysteme werden üblicherweise mit einer Gleichspannung von 3-5 V betrieben, während an den Schienen eine Wechselspannung zwischen 12 und 24 V anliegt (je nach Nenngröße). Eine fehlende galvanische Entkopplung kann fatale Folgen für die digitalen Komponenten haben.
Die meisten Digitalkomponenten werden daher von den Herstellern mit Bauteilen zur galvanischen Entkopplung bestückt. Einige Beispiele:
- Booster: Als elektrische Trennung zwischen Digitalkomponenten (z.B. der Zentrale) und den Schienen werden die Boostereingänge galvanisch getrennt, so dass nur die Digitalsignale übertragen werden, jedoch keine elektrischen Ströme fließen können.
- Schaltdecoder: Relais auf den Decodern bewirken eine galvanische Trennung. Deshalb eignen sich nur Versionen mit Relais zum Abschalten von Gleisabschnitten. Versionen ohne Relais (und damit ohne galvanische Trennung) schaffen eine elektrische Verbindung zwischen Digitalsystem und Schienen.
- s88-Rückmelder: Fehlt eine elektrische Trennung, können Ausgleichsströme Falschmeldungen im s88-Bus verurusachen.
Geschwindigkeitskennlinie
Die Geschwindigkeitskennlinie ordnet den einzelnen Fahrstufen eine bestimmte Motorspannung zu. Unsere Lokdecoder haben als Standard eine lineare Geschwindigkeitskennlinie, deren Anfangs- und Endpunkt durch die Anfahr- und Höchstgeschwindigkeit festgelegt wird.
Bei den Lokdecodern der Serie 30 plus kann zusätzlich die Mittengeschwindigkeit eingestellt werden.
 Alternativ kann für den 27- bzw. 28-Fahrstufen-Modus (MM- bzw. DCC-Format) eine Geschwindigkeitskennlinie individuell programmiert werden. Jeder Fahrstufe wird dabei eine beliebige Motorspannung zugeordnet, aus der die individuelle Kennlinie errechnet wird.
Alternativ kann für den 27- bzw. 28-Fahrstufen-Modus (MM- bzw. DCC-Format) eine Geschwindigkeitskennlinie individuell programmiert werden. Jeder Fahrstufe wird dabei eine beliebige Motorspannung zugeordnet, aus der die individuelle Kennlinie errechnet wird.
Abbildung: Beispiel für eine individuelle Geschwindigkeitskennline. Die Kennlinie ist im unteren Fahrstufenbereich flacher geneigt, so dass eine feinfühlige Ansteuerung bei niedrigen Fahrstufen möglich ist.
Geschwindigkeitsabhängige Funktionen
>>> Lokdecoder
Geschwindigkeitsabhängige Funktionen können automatisch bei Erreichen einer per CV definierten Fahrstufe geschaltet werden. Den Funktionsausgängen wird für die Fahrstufenbereiche unter- und oberhalb der definierten Fahrstufe jeweils eine individuelle Spannung zugeordnet. Damit lassen sich z.B.
- das Fernlicht ein- und ausschalten,
- die Führerstandsbeleuchtung regeln oder
- die Intensität des Dampfausstoßes beeinflussen.
>>> Rückmeldung
Gleisbesetztmelder (auch als Gleisbelegtmelder bezeichnet) erkennen, ob sich in einem Gleisabschnitt ein Stromverbraucher befindet. Ihre Einsatzgebiete sind
in analogen Anlagen:
- in Kombination mit Gleisbildstellpulten
- als Teil einer Blockstellensteuerung
- als Teil einer automatisierten Steuerung
in digitalen Anlagen:
- zusammen mit Rückmeldern (z.B. s88). In Gleichstromanlagen sind sie unverzichtbar, wenn die Belegtmeldungen über digitale Rückmelder an die PC-Steuerung weitergeleitet werden sollen.
Merkmale von Gleisbesetzmeldern:
- Zahl der Gleisabschnitte, die ein Belegtmelder überwachen kann (üblich sind 1, 4 oder 8).
- Empfindlichkeit: Eine hohe Empfindlichkeit (z.B. ab 1 mA) ist v.a. für den Einsatz in analogen Anlagen sinnvoll. In digitalen Anlagen ist eine niedrigere Empfindlichkeit oft empfehlenswert, um Falschmeldungen aufgrund von Störspannungen im Digitalsystem zu vermeiden.
- Auswertung: Möglich ist eine Auswertung gegen Masse des Belegtmelders oder - bei galvanischer Trennung der Ein- und Ausgänge - gegen Masse nachgeordneter Komponenten. Letztgenanntes gewährleistet eine störungsfreie Datenübertragung an digitale Rückmelder.
- Anzeige der Belegtmeldungen: Möglich sind z.B. integrierte LEDs oder der externe Anschluss von LEDs oder Lämpchen.
- maximale Belastbarkeit der Ausgänge
- maximaler Strom in den Gleisabschnitten
Weitere Informationen zu Gleisbesetzmeldern
>>> Digitalsteuerung, Booster
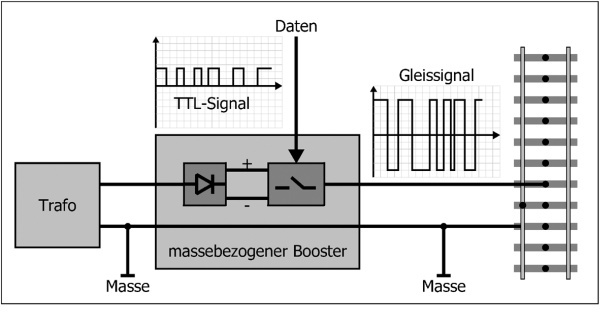
Massebezogenes Gleissignal
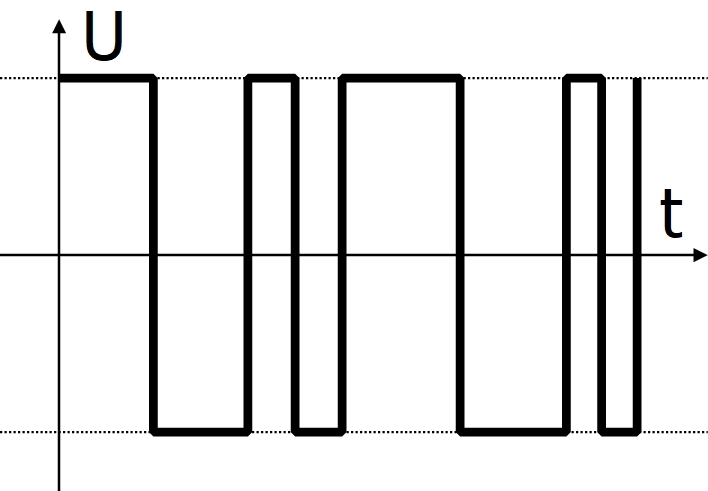
Märklin-kompatible Booster sind massebezogen, d.h. die Booster und die komplette Modellbahnanlage einschließlich aller Digitalkomponenten und Trafos haben eine gemeinsame Masse. Die positive (+) und die negative Spannung (–) werden abwechselnd (entsprechend dem von der Zentrale gesendeten TTL-Signal) an die Schiene gelegt.
Da die Halbleiter, die die negative und die positive Spannung erzeugen, einen unterschiedlichen Spannungsabfall haben, entstehen am Gleisausgang des Boosters Spannungsdifferenzen bezüglich Masse von bis zu 1 V und damit ein unsymmetrisches Gleissignal. Das macht einen zuverlässigen Einsatz des ABC-Bremsverfahrens unmöglich.
Vorteil der durchgängigen Masseverbindung ist, dass damit technisch sehr einfache Rückmeldesysteme möglich sind, wie z.B. das s88-Rückmeldesystem. Unabsichtlich geknüpfte Masseverbindungen bergen jedoch die Gefahr von Brummschleifen, die Auswirkungen auf die Funktionsweise von anderen Komponenten haben können. Daher müssen alle Komponenten in masse-bezogenen Systemen sehr sorgfältig angeschlossen werden.
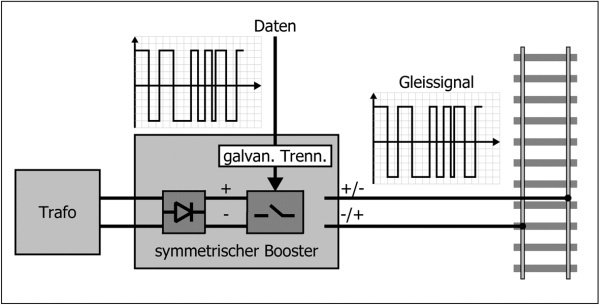
Symmetrisches Gleissignal
Bei DCC-konformen Boostern sind die Ein- und Ausgänge (z.B. durch einen Optokoppler) galvanisch voneinander getrennt, es besteht also keine elektrische Verbindung zwischen Zentrale und Boosterausgang. Das Ausgangssignal entsteht durch die ständige Umpolung der internen Betriebsspannung des Boosters nach den Vorgaben des digitalen Steuersignals aus der Zentrale. Da am Ausgang immer die selbe Spannung anliegt (abwechselnd positiv und negativ), ist die Ausgangsspannung am Boosterausgang DCC-konformer Booster 100 % symmetrisch.
Diese symmetrische Ausgangsspannung wird für den Einsatz des ABC-Bremsverfahrens benötigt, das auf der Erzeugung von unsymmetrischen Spannungen in einem Bremsabschnitt beruht. Positiver "Nebeneffekt" der galvanischen Trennung ist das Fehlen einer durchgängigen Systemmasse. Brummschleifen werden damit wirkungsvoll verhindert.
Wenn eine gemeinsame Masse benötigt wird, z.B. zum Einsatz des s88-Rückmeldesystems, muss der Masseanschluss der s88-Rückmelder mit einer Schiene verbunden werden. Genauso wie beim Einsatz massebezogener Booster ist auch bei dieser Variante von entscheidender Bedeutung, dass die Masseverbindung zur jeweils "richtigen" Schiene hergestellt wird.
Tipp: Technische Grundlagen von Boostern als Infothek-Blatt zum kostenlosen Download.
>>> Digitalsteuerung, Booster
Lokmotoren sind - abhängig von der Nenngröße - für den Betrieb mit einer bestimmten Gleisspannung ausgelegt. Werden sie mit einer deutlich höheren Gleisspannung angesteuert, werden die Motoren stärker belastet und die Kohlen stärker abgenutzt, HF-Störungen und Bürstenfeuer werden verstärkt.
|
Nenngröße
|
empfohlene Gleisspannung
|
empfohlene Trafospannung
|
|
Z
|
12 V
|
12 V
|
|
N
|
14 V
|
15 V
|
|
TT
|
14 V
|
15 V
|
|
H0
|
18 V
|
16 - 18 V
|
|
0, I und II
|
22 - 24 V
|
20 V
|
Verwenden Sie für die Versorgung eines Boosters einen Trafo, dessen Nennspannung nicht wesentlich höher als die gewünschte Gleisspannung ist. Die "überschüssige" Leistung, die entsteht, muss sonst vom Booster als Wärme abgeführt werden. Ist diese Leistung zu hoch, überhitzt der Booster und schaltet infolge Übertemperatur ab.
A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P | Q | R | S | T | U | V | W | X | Y | Z
Herzstückpolarisierung
>>> Weichensteuerung, Servosteuerung, Servodecoder
Die Herzstücke von Weichen in 2-Leiter-Anlagen sind normalerweise stromlos, um Kurzschlüsse zu vermeiden. Beim Überfahren (vor allem mit Fahrzeugen mit wenig Stromabnehmern bei niedriger Geschwindigkeit) kann es leicht passieren, dass die Lok auf der Weiche stehenbleibt. Dann hilft nur noch ein Schubs durch die Hand des Modellbahners.
Die Lösung des Problems stellt die Herzstückpolarisierung dar. Damit kein Kurzschluss auftritt, wird das Herzstück stromlos geschaltet, bevor die Weiche umgeschaltet wird. Nach dem Umschalten der Weiche wird das Herzstück wieder zugeschaltet. In einigen Weichen ist dies schon integriert. Bei allen anderen Weichen braucht es jedoch eine spezielle Steuerung, die genau diesen Ablauf machen können.
HSI-88
>>> Digitalsteuerung, Rückmeldung, s88
HSI-88 wurde entwickelt, um die s88-Rückmeldungen von einem PC-Interface mit Anschlussmöglichkeit für drei s88-Busleitungen in den PC zu übertragen.
A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P | Q | R | S | T | U | V | W | X | Y | Z
Inrush-Current
>>> Booster, Fahrzeug-Decoder, Pufferschaltungen
--> Einschaltstrom
(Akustische) Impedanz
>>> Lautsprecher
Die Impedanz beschreibt den akustischen Widerstand, der der Schallausbreitung im (freien) Schallfeld entgegengesetzt wird. Die genaue Erklärung ist schon "höhere Akustik" und für den Modellbahner nicht von Bedeutung. Es reicht völlig aus, bei der Auswahl des Lautsprechers für einen Soundbaustein Folgendes zu beachten:
Impedanz des Lautsprechers
= Impedanz des Ausgangs (des Soundbausteins): perfekt, es gibt keine Probleme.
< Impedanz des Ausgangs (des Soundbausteins): Schäden an der Endstufe des Soundbausteins möglich. Tunlichst vermeiden!
> Impedanz des Ausgangs (des Soundbausteins): Wiedergabe sehr leise.
A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P | Q | R | S | T | U | V | W | X | Y | Z
Kabel / Leitung
Elektrische Leitungen sind der Oberbegriff für die Teile des Stromkreises, die elektrische Energie transportieren (= Versorgungsleitungen). Von Leitungen spricht man auch bei der Signalübertragung. Bei der Modellbahn sind die Signalleitungen oft mit den Versorgungsleitungen "gekoppelt". Beispiele sind die Verbindungen zwischen Booster und Schiene oder zwischen Stromabnehmer und Lokmotor. Reine Signalleitungen, z.B. die Busleitungen von Digitalsystemen, sind ebenfalls üblich.
In Normen wird zwischen elektrischen Kabeln und elektrischen Leitungen begrifflich unterschieden, umgangssprachlich werden die Begriffe elektrisches Kabel und elektrische Leitung oft synonym verwendet. Für die Modellbahn können wir uns diesem umgangssprachlichen Gebrauch anschließen.
Kehrschleife | Kehrschleifensteuerung
>>> 2-Leiter-Anlagen (Gleichstrom-Anlagen)
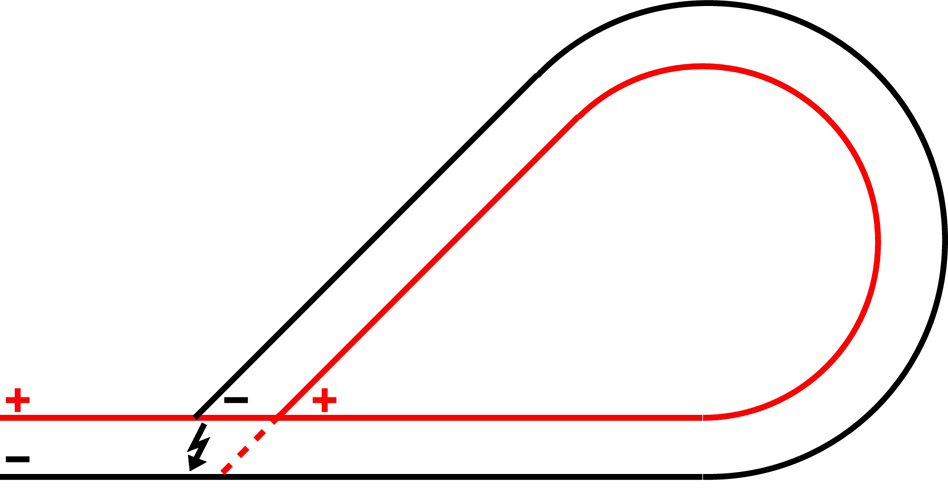
In Zwei-Leitersystemen treffen an der Weiche einer Kehrschleife entgegengesetzte Polaritäten aufeinander. Sobald ein Fahrzeug die unterschiedlich gepolten Abschnitte überbrückt, tritt daher entweder bei der Einfahrt in oder der Ausfahrt aus der Kehrschleife ein Kurzschluss auf.
Kehrschleifensteuerungen müssen dafür sorgen, dass die Polaritäten beim Überfahren der Trennstellen innerhalb und außerhalb der Kehrschleife übereinstimmen.
Die Funktionsweise von Steuerungen für analoge und digitale Anlagen ist grundverschieden.
- In digitalen Anlagen muss die Kehrschleifensteuerung grundsätzlich die Polarität des Datensignals innerhalb der Kehrschleife an die außerhalb der Kehrschleife anpassen. Würde die Polarität außerhalb der Kehrschleife geändert, würden am Übergang zum nächsten Boosterabschnitt unterschiedliche Polaritäten aufeinandertreffen, das Problem wäre somit nur verlagert. Zur Lösung des Kehrschleifenproblems gibt es zwei verschiedene Lösungsansätze:
- bei einem Kurzschluss möglichst schnell die Polarität innerhalb der Kehrschleife anpassen
- den Kurzschluss im Voraus erkennen und die Polarität anpassen, bevor die Lok in die Kehrschleife hineinfährt
- In analogen Anlagen muss der Abschnitt, in den die Lok einfährt, die gleiche Polarität haben wie der Abschnitt, aus dem sie hinausfährt, da sie bei einem Polaritätswechsel die Fahrtrichtung ändern würde. Je nachdem, ob die Lok in die Kehrschleife hinein- oder hinausfährt, wird demnach die Polarität im Abschnitt innerhalb oder außerhalb der Kehrschleife angepasst. In analogen Anlagen funktioniert diese Lösung, da Kehrschleifen hier üblicherweise nur mit isolierten Streckenabschnitten in Verbindung stehen, die nur von einem Zug befahren werden (z.B. bei Pendelstrecken).
Konstanter Bremsweg
>>> Lokdecoder
Sobald in CV4 des Lokdecoders die Bremsverzögerung aktiviert ist, hängt die Länge des Bremsweges
- von der eingestellten Verzögerung und
- von der Höhe der Fahrstufe beim Auslösen des Bremsvorgangs ab.
Ein exakter Halt an Haltepunkten ist damit nicht möglich.
Sofern der Decoder diese Möglichkeit bietet, kann in den CVs ein konstanter Bremsweg definiert werden, den die Lok beim Übergang von einer beliebigen Fahrstufe zur Fahrstufe 0 zurücklegen soll. Der Bremsweg entspricht dann der Strecke, die die Lok mit der eingestellten Bremsverzögerung bei höchstmöglicher Fahrstufe bis zum Halten zurücklegt. Wird der Bremsvorgang bei einer niedrigeren Fahrstufe ausgelöst, wird die Zeit bis zum Wechsel zur nächst niedrigeren Fahrstufe automatisch verlängert. Damit wird erreicht, dass der Bremsweg unabhängig von der Fahrstufe beim Starten des Bremsvorgangs immer gleich lang ist.
|
Kurzer Bremsweg: niedrige Bremsrate
|
Langer Bremsweg: hohe Bremsrate
|
Bei aktivem konstantem Bremsweg ist die Länge des Bremsweges immer gleich lang, unabhängig von der Fahrstufe beim Auslösen des Bremsvorgangs. Je höher der in CV4 eingestellte Wert für die Bremsrate ist, desto länger ist der Bremsweg. |
>>> Lokdecoder
Mit einer einzigen Taste können Sie komplette An- oder Entkupplungsvorgänge auslösen:
Ankuppel-Automatik
Jeweils eine Funktionstaste wird für das Ankuppeln in Fahrtrichtung "vorwärts" und "rückwärts" zugeordnet. Zum Ankuppeln fährt die Lok mit einer per CV einstellbaren Geschwindigkeit an den anzukuppelnden Waggon heran. Sobald der zugeordnete Schalteingang mit Masse verbunden wird (z.B. durch eine stromübertragende Kupplung) oder nach Ablauf einer bestimmten Zeit, hält die Lok an. Nach dem Ankoppeln wird die ursprüngliche Fahrtrichtung wieder eingestellt.
"Entkuppel-Walzer"
Nach dem Aktivieren der Entkuppel-Automatik fährt die Lok zunächst ein Stück entgegen die eingestellte Fahrtrichtung, um die Kupplung zu entlasten. Danach wird der Funktionsausgang, an den die Kupplung angeschlossen ist, für die eingestellte Zeit eingeschaltet. Gleichzeitig wird die Fahrtrichtung intern wieder auf die eingestellte Richtung umgestellt und die Motorspannung wieder eingeschaltet. Die Lok fährt daraufhin ein kurzes Stück vom abgekuppelten Waggon weg.
Folgende Parameter der Entkuppel-Automatik können über CVs eingestellt werden:
- Spannung, die während des Entkuppelvorgangs an den Motor angelegt wird
- Zeitdauer, während der der Motor und Ausgang (Kupplung) mit Strom versorgt werden (= Kickzeit)
>>> Booster
Zwei Varianten dieser Schutzfunktion sind üblich:
-
Kurzschlussrückmeldung an die Zentrale: Der Booster meldet die Überschreitung des Abschaltstroms über die Kurzschluss-Rückmeldeleitung an die Zentrale, woraufhin diese die komplette Anlage abschaltet. Diese Variante ist z.B. beim automatisierten Fahren nach Fahrplan sinnvoll. Die Kurzschlussrückmeldung wird bei DCC-konformen und Märklin-kompatiblen Boostern auf verschiedene Weise übertragen. Daher ist es i.d.R. nicht möglich, von einem DCC-konformen Booster, der an den Gleisausgang einer Zentralen mit Märklin-kompatibler Boosterschnittstelle angeschlossen ist, eine Kurzschlussrückmeldung an die Zentrale zu senden.
-
Interne Kurzschlussabschaltung: Bei Überschreitung des Abschaltstroms schaltet der Booster den Strom für den angeschlossenen Boosterabschnitt selbsttätig ab. Auf der übrigen Anlage läuft der Betrieb weiter. Diese Version eignet sich für Bereiche mit eigenständigem Betrieb, z.B. im BW. Je nach Ausführung des Boosters ist die Zeitdauer bis zum Ansprechen der Kurzschluss-Abschaltung fest eingestellt oder kann individuell angepasst werden.
Automatisches Wiedereinschalten nach Kurzschluss:
Manche Booster schalten sich nach einem Kurzschluss automatisch nach Ablauf einer bestimmten Zeit wieder ein. Liegt der Kurzschluss dann noch vor, schaltet er sofort wieder ab. Je nach Ausführung des Boosters können eingestellt werden:
- die Zeit bis zum Wiedereinschalten nach einem Kurzschluss (z.B. 4 bis 10 Sekunden) und / oder
- die Zeit bis zum Wiedereinschalten nach mehreren Fehlversuchen.
>>> Booster
Als Grundlage für ein PC-gesteuertes Boostermanagement wird beim Überschreiten eines Grenzwertes, der unterhalb des eingestellten Abschaltstroms liegt, eine Kurzschlusswarnung vom Booster an den PC gesendet. Die PC-Steuerung kann dann (wenn ein Kurzschluss durch Überlastung droht) für den Betrieb unwesentliche Komponenten (z.B. Wagenbeleuchtungen ) im überlasteten Boosterkreis ausschalten.
A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P | Q | R | S | T | U | V | W | X | Y | Z
>>> Lokdecoder LD-G (für Gleichstrommotoren)
Loks werden bei gleichbleibender Motorspannung langsamer, wenn sie bergauf oder in eine Kurve fahren oder wenn Waggons angehängt werden. Lastgeregelte Lokdecoder beeinflussen die Motorspannung so, dass die Geschwindigkeit der Lok im Fahrbetrieb bei einer gewählten Fahrstufe immer konstant bleibt. Um die Lastregelung an die individuellen Eigenschaften des Lokmotors anpassen zu können, besteht bei unseren Lokdecodern die Möglichkeit, die Parameter der Lastregelung einzustellen. Wenn die Lastregelung nicht gebraucht wird (oder stört), kann sie abgeschaltet werden.
Für die direkte Ansteuerung von Wechselstrommotoren gibt es nur sehr wenige Lokdecoder mit Lastregelung. Wir haben seit vielen Jahren keine mehr im Programm. Gründe dafür sind der hohe technische Aufwand einerseits (und die damit verbundenen hohen Herstellungskosten) und die eher unbefriedigenden Ergebnisse andererseits. Ein Wechselstrom-Motor kann mit vergleichsweise geringem Aufwand umgebaut und dann mit lastgeregelten Gleichstrom-Decodern angesteuert werden. Für den Umbau kommen zum Einsatz:
|
|
|
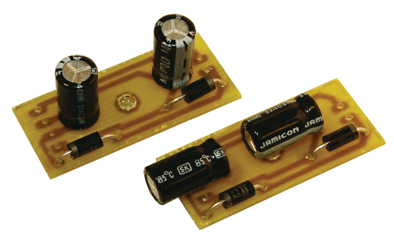
Weitere Informationen zum Thema Lastregelung für Wechselstrommotoren
>>> Lokdecoder LD-G (für Gleichstrommotoren)
Die Lastregelung wird durch drei Parameter bestimmt, die aufeinander abgestimmt sein müssen, um optimale Fahreigenschaften zu erzielen. Die Lastregelparameter können durch Veränderung der zugeordneten CV-Variablen an die individuellen Eigenschaften des Lokmotors angepasst werden. Die Parameter sind:
- KP: Der proportionale Bestandteil der Regelung sorgt dafür, dass der Unterschied zwischen dem Soll- und dem Istwert möglichst klein wird. Er kann niemals den Wert "0" annehmen. Dieser Bestandteil wirkt sich auf die Grundgeschwindigkeit aus. Ist der eingestellt Wert zu klein, fährt die Lok zu langsam. Ist der Wert zu groß, ruckelt die Lok während der Fahrt.
- KI: Der integrale Anteil der Regelung sorgt dafür, dass der verbleibende Unterschied zwischen dem Soll- und dem Istwert auf 0 reduziert wird. Damit werden auch sehr kleine Abweichungen ausgeregelt. Ist der eingestellte Wert zu groß, führt das zu starkem Ruckeln der Lok während der Fahrt.
- KD: Der differentiale Anteil der Regelung sorgt dafür, dass die Regelung nicht zu schnell umgesetzt wird. Ist der eingestellte Wert zu niedrig, ruckelt die Lok während der Fahrt. Ist der eingestellte Wert zu groß, schaukelt die Lok während der Fahrt.
Tipp: Lastregelparameter einstellen
Lautsprecher: Die Bedeutung der technischen Werte
>>> Fahrzeugdecoder, Sound-Decoder
Abmessungen [mm]
Vor allem in Fahrzeugen für kleinere Nenngrößen ist meist nur wenig Platz, trotzdem gilt auch hier die Regel, dass der Lautsprecher so groß wie möglich gewählt werden sollte
- In der Regel steigen Belastbarkeit, Lautstärke und Übertragungsbereich mit der Größe des Lautsprechers, oder kurz formuliert: Die Wiedergabequalität steigt meistens mit der Größe des Lautsprechers.
- Daraus resultiert unser Tipp: Wählen Sie für den Einbau in ein Fahrzeug einen möglichst großen Lautsprecher wählen.
Belastbarkeit [W]
- Gibt die Leistung an, die der Lautsprecher "vertragen" kann. Liefert der Soundbaustein mehr, kann der Lautsprecher beschädigt werden.
- Hat der Lautsprecher eine höhere Leistung als der Soundbaustein liefert, hat das keinen Einfluss.
- Nenn-Belastbartkeit (auch als nominale Leistung bezeichnet) ist die Leistung, die der Lautsprecher über einen langen Zeitraum aushält (laut Norm 100 Stunden).
- Die maximale Belastbarkeit liegt bei den meisten Lautsprechern ca. 50 % höher als die Nenn-Leistung.
Impedanz [Ohm]
Die Impedanz beschreibt den akustischen Widerstand, der der Schallausbreitung im (freien) Schallfeld entgegengesetzt wird. Die genaue Erklärung ist schon "höhere Akustik" und für den Modellbahner nicht von Bedeutung. Es reicht völlig aus, bei der Auswahl des Lautsprechers für einen Soundbaustein Folgendes zu beachten:
Lautstärke [dB]
Eine Verringerung der Lautstärke ist immer möglich, entweder
- durch Einstellung des Lautsprecherausgangs des Soundbausteins
- oder (wenn der Soundbaustein keine Einstellung der Lautstärke ermöglicht): durch Einbau eines Vorwiderstands in der Zuleitung zum Lautsprecher (max. 10 Ohm)
Übertragungsbereich [Hz]
- Je niedriger der untere Wert ist, desto besser werden tiefe Töne widergegeben - was z.B. bei Dampflokgeräuschen wichtig ist.
- Bauartbedingt können Kleinst-Lautsprecher Töne mit niedrigen Frequenzen nicht wiedergeben.
- Hohe Töne über 15.000 Hz hören Erwachsene i.d.R. nicht.
>>> Modellbahnelektronik
Leuchtdioden sind - wenn es um das Beleuchten von Fahrzeugmodellen oder Szenerien auf der Modellbahn geht, wahre Allround-Genies: Es gibt sie in unzähligen Formen, Größen, Farben und Helligkeiten. Beispiele:
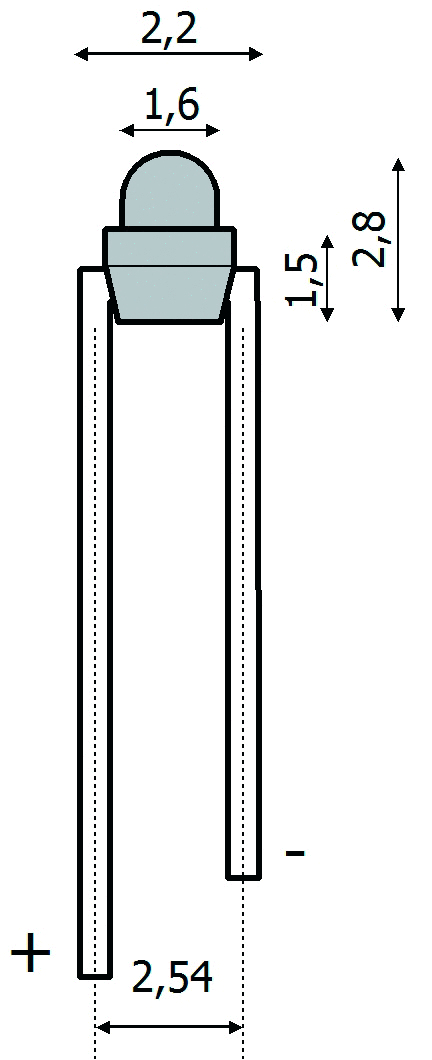
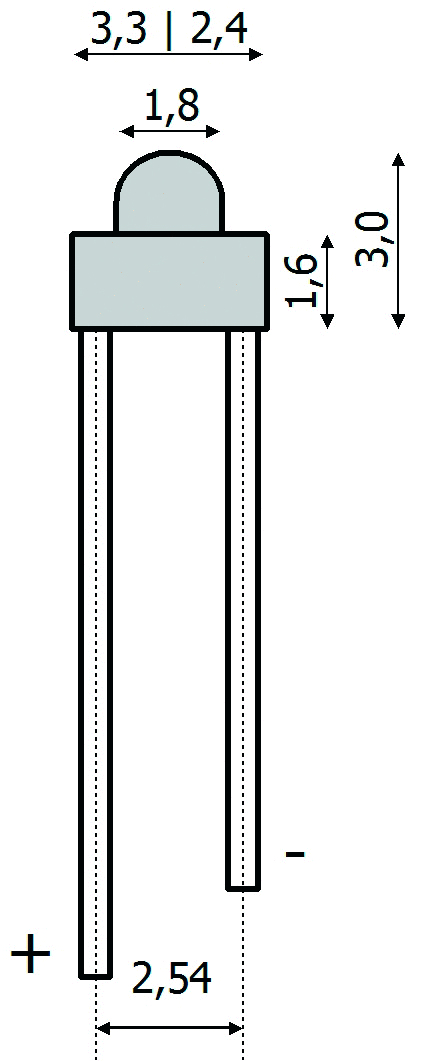
Bedrahtete LEDs
 |
 |
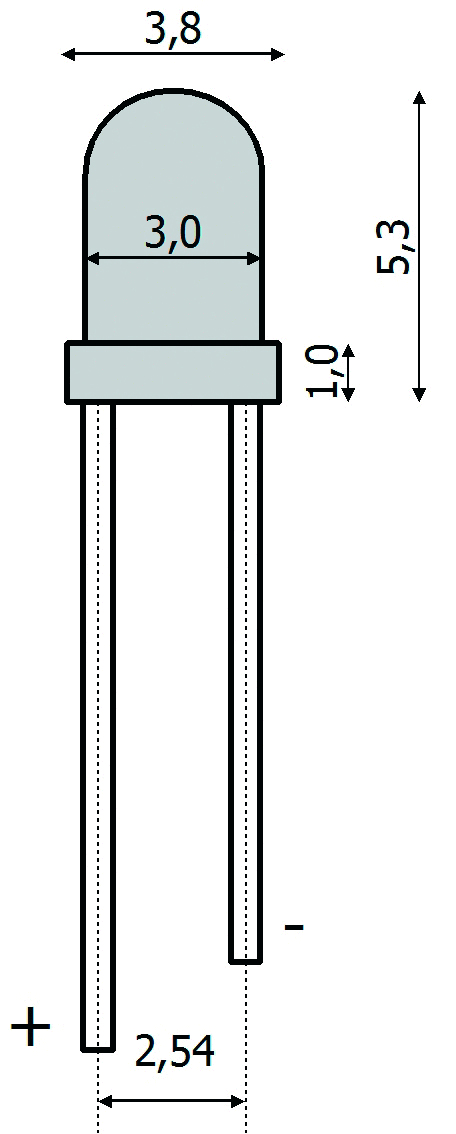 |
| 1,6 mm-LED | 1,8 mm-LED | 3 mm-LED |
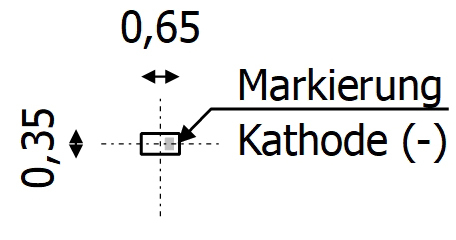
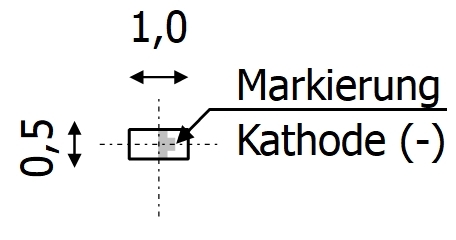
SMD-LEDs
 |
 |
 |
 |
 |
| Bauform 0201 | Bauform 0402 | Bauform 0603 | Bauform 0805 | Bauform PLCC2 |
Im Vergleich zu Glühlampen haben LEDs diverse Vorteile:
- Sie verbrauchen weniger Strom.
- Sie erzeugen im Betrieb kaum Wärme.
- Sie sind langlebiger.
Der Anschluss von LEDs erfordert jedoch deutlich mehr Know How als die Verwendung einer Glühlampe. Damit LEDs (lange) leuchten,
- muss der Strom, der durch sie hindurchfließt, grundsätzlich begrenzt werden (indem ein Vorwiderstand oder eine LED-Konstantstromquelle vorgeschaltet wird)
- muss die anliegende Spannung mindestens so hoch sein wie die spezifische Durchlass-Spannung der LED
- muss die LED richtig gepolt angeschlossen werden
Tipp: LED-Know How gibt es als Infothek-Blatt zum kostenlosen Download.
>>> Modellbahnelektronik
LEDs eignen sich wegen ihres geringeren Stromverbrauchs, ihrer Langlebigkeit und der Vielzahl verschiedener Bauformen, Größen und Farben hervorragend als Beleuchtung von Loks, Wagen, Gebäuden, Kirmesbuden etc. Die scheinbar so einfache Lösung hat jedoch einige Haken:
- Auf analogen Anlagen leuchten die LEDs um so heller, je schneller die Lok fährt (oder anders formuliert: je höher die Spannung ist).
- Bei digitalen Anlagen stellt sich dieses Problem zwar nicht, da die Spannung am Gleis nahezu konstant ist. Je nach Anlagentyp (bzw. Nenngröße) kann die Gleisspannung jedoch 12 V oder auch 24 V betragen. LEDs mit einem für 18 V berechneten Vorwiderstand leuchten im einen Fall zu dunkel, im anderen zu hell.
Eine LED-Konstantstromquelle schafft hier Abhilfe: Die kleine Schaltung (meistens bestehend aus Transistor und Diode) sorgt dafür, dass im Betrieb ein konstanter Strom zur Verfügung steht (z.B. 20 mA). An die Schaltung können LEDs ohne Vorwiderstand angeschlossen werden. Sie leuchten ab Erreichen der erforderlichen Mindestspannung immer gleich hell, unabhängig von der anliegenden Spannung. Die Mindestspannung für weiße und blaue LEDs beträgt ca. 4 bis 5 V, für andersfarbige LEDs ca. 3 V.
Leitung
--> Kabel
Litze (Schaltlitze)
Schaltlitzen sind grundsätzlich aus mehreren Drähten aufgebaut. Für den Modellbau kommen in Frage:
- flexible Litzen und
- hochflexible Litzen, die im Vergleich zu "nur" flexiblen Litzen aus mehr einzelnen und dafür dünneren Kupferdrähten bestehen.
Bei gleichem Kupferquerschnitt sind Litzen deutlich flexibler als Drähte.
Weitere Infos zu Drähten, Litzen, Adern und Kabeln
Lokdecoder
>>> Digitalsteuerung
Lokdecoder empfangen die digitalen Fahr- und Schaltbefehle, die von der Digitalzentrale an ihre (Lok-) Adresse gesendet werden und steuern den Motor und die an die Funktionsausgänge angeschlossenen Zusatzgeräte (z.B. Beleuchtungen). Voraussetzung für einen reibungslosen Digitalbetrieb ist die korrekte Übertragung von Strom und Digitalsignalen über die Schiene zum Decoder. Wesentlich dabei sind saubere, korrosionsfreie Schienen und Stromabnehmer der Fahrzeuge.
Tipp: Digital-Umbauten von analogen Loks als Infothek-Blatt zum kostenlosen Download.
LocoNet
>>> Digitalsteuerung
Das Bussystem für digitale Modellbahnanlagen wurde von der Firma Digitrax entwickelt. Als Busleitungen kommen 6-adrige Kabel mit RJ 12-Steckern zum Einsatz. Das LocoNet wird zur Datenübertragung zwischen Digitalzentrale, digitalen Eingabegeräten, Steuerbausteinen, Rückmeldern und Boostern genutzt.
Bei den Modul-Treffen des FREMO (Freundeskreis Europäischer Modellbahner e.V.) wird das LocoNet als Bus für die Handregler verwendet.
Hinweis: Bisher (Stand: April 2017) haben wir keine Komponenten im Programm, die Daten erzeugen oder verarbeiten, die über das LocoNet übertragen werden. Wir bieten jedoch Produkte an, die Anschlüsse für die LocoNet-typischen RJ 12-Kabel haben und die LocoNet-Daten durchschleifen (Booster B-4, XL-Verteiler).
A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P | Q | R | S | T | U | V | W | X | Y | Z
Magnetartikeldecoder
>>> Zubehördecoder (stationäre Decoder)
Magnetartikeldecoder schalten alle Komponenten, die einen Impuls zum Hin- und Herschalten benötigen, z.B. Weichen und Formsignale mit Doppelspulenantrieben (mit und
ohne Endabschaltung) oder Entkuppler. Landläufig werden sie oft als Weichendecoder bezeichnet, was jedoch unpräzise ist.
Bei Decodern mit einstellbarer "On-Time" kann die Länge des Schaltimpulses an die individuellen Erfordernisse angepasst werden. Mit einer auf "unendlich" eingestellten On-Time entspricht die Funktionsweise eines Magnetartikeldecoders der eines Schaltdecoders ohne Relais. Er kann dann zum Umschalten zwischen zwei Verbrauchern mit geringem Strombedarf (z.B. 2-begriffigen Lichtsignalen) eingesetzt werden.
>>> Digitalsteuerung
Das Datenformat wurde von Märklin im Jahr 2005 als Nachfolger für das veraltete und nicht mehr entwicklungsfähige Motorola-Format entwickelt. Aus rechtlichen Gründen konnten wir lange Zeit keine Produkte für das mfx-Format anbieten. Seit 2019 ermöglicht Märklin die Nutzung des Protokolls durch andere Hersteller. Wir werden voraussichtlich ab 2020 mfx-Decoder anbieten. Zunächst beschränken wir uns an dieser Stelle noch auf einige wesentliche Informationen:
- mehr als 16.000 Fahrzeugdecoderadressen. Die Adressen werden den Fahrzeug-Decodern von der Zentrale zugewiesen und spielen für den Anwender keine Rolle, da er die Loks über ihre Namen oder zugeordnete Piktogramme auswählt.
- 128 Fahrstufen zur Ansteuerung der Lokdecoder
- Schaltfunktionen der Fahrzeugdecoder: F0 bis F15
- Nutzung für Zubehördecoder: bisher nicht definiert
Die Übertragung von Rückmeldedaten ist Teil des mfx-Formates. Bis heute wird mfx ausschließlich genutzt, um die Fahrzeug-Decoder automatisch bei der Zentrale anzumelden.
Die Rückmeldung über mfx ist so konzipiert, dass die Zentrale die Lücke für die Übertragung der Rückmeldedaten bereitstellt. Die Rückmeldungen werden von einem Detektor, der in der Zentrale integriert ist, empfangen und verarbeitet.
mfx und Booster
Die Datenübertragung erfolgt von den Decodern über die Schiene zurück zur Zentrale. Solange die Anlage ausschließlich über den in der Zentrale integrierten Booster versorgt wird, ist das problemlos möglich. Wird jedoch ein zusätzlicher Booster benötigt, muss der Übertragungsweg für die Rückmeldungen (= die Schienen) unterbrochen werden, um die einzelnen Boosterabschnitte elektrisch voneinander zu trennen. Die Konsequenz: Loks in Abschnitten, die über externe Standard-Booster versorgt werden, können sich nicht bei der Zentrale anmelden.
Um die Daten über die Trennstelle zwischen den Boosterabschnitten zu übertragen, kommen als Lösungen in Frage
- spezielle mfx-Booster mit eingebauten Detektoren, die die Daten über einen schienenunabhängigen Datenbus an die Zentrale weiterleiten oder
- Standard-Boostern in Kombination mit Booster-Links, die die Trennstelle zwischen den Boosterabschnitten überbrücken
>>> Lokdecoder
Wenn bei der Decoderauswahl die Frage "Gleich- oder Wechselstrom?" auftaucht, geht es nicht darum, ob Sie analog mit Gleich- oder Wechselstrom fahren, sondern um die Motorart der Lok. Folgende Motorarten sind bei Modellbahnloks typisch:
-
Allstrommotoren (auch als Wechselstrommotoren bezeichnet) waren z.B. in den H0-Loks von Märklin und HAG lange Zeit Standard (bei Märklin bis etwa zum Jahr 2000). Zur direkten Ansteuerung dieses Motortyps benötigen Sie speziell ausgelegte Decoder. In der Regel sind Decoder für die direkte Ansteuerung von Wechselstrommotoren nicht lastgeregelt.
-
Gleichstrommotoren werden mittlerweile in allen Nenngrößen standardmäßig eingesetzt. Die sogenannten "Hochleistungs-Motoren" der Firma Märklin sind ebenfalls Gleichstrommotoren. Decoder für die Ansteuerung von Gleichstrommotoren sind heute meistens lastgeregelt.
-
Glockenankermotoren (auch nach dem Hersteller als Faulhabermotoren bezeichnet) sind vom Prinzip Gleichstrommotoren – allerdings deutlich aufwändiger konstruiert und daher teurer. Die großen Vorteile: Sie sind nahezu verschleissfrei und arbeiten mit sehr hohen Drehzahlen, was einen sehr gleichmäßigen, ruhigen Lauf gewährleistet. Grundsätzlich eignen sich zur Ansteuerung von Glockenankermotoren Lokdecoder für Gleichstrommotoren. Allerdings sollten die Decoder die Motoren mit einer hohen Frequenz von mindestens 6 kHz (der sogenannten PWM-Fequenz) ansteuern.
- Sinus-Motoren sind Drehstrommotoren, die von einer speziellen Elektronik gesteuert werden. Für diese Motorart wurde die 21MTC-Schnittstelle entwickelt. Sie können an diese Motoren einen Decoder mit 21MTC-Schnittstelle (nach NEM 660) anschließen. Sie müssen allerdings die Lastregelung des Decoders abschalten, da die Regelung von der zum Motor gehörenden Steuerung übernommen wird.
Lokdecoder werden an die spezifischen Eigenschaften dieser verschiedenen Motorarten angepasst. Unsere Lokdecoder für Gleichstrom- und Glockenankermotoren haben ein "G", die für Wechselstrommotoren ein "W" in der Kurzbezeichnung.
Motorstrom
>>> Lokdecoder
Die Höhe des Motorstroms ist ein wesentliches Kriterium bei der Auswahl des "richtigen" Lokdecoders. Ist der tatsächliche Motorstrom größer als der maximale Motorstrom des Decoders, wird der Motortreiber auf dem Decoder bei der Inbetriebnahme beschädigt oder – wenn der Deccoder einen Überlastschutz hat – schaltet der Decoder bei der Inbetriebnahme ab.
Durchschnittliche Werte für den Motorstrom:
|
Nenngröße
|
Motorart
|
Motorstrom ca. [mA]
|
|
|
|
|
alte Motoren
(vor 2000)
|
neue Motoren
|
|
Z
|
Gleichstrom
|
300
|
200
|
|
N
|
Gleichstrom
|
400
|
200
|
|
TT
|
Gleichstrom
|
700
|
300
|
|
H0
|
Gleichstrom
|
800
|
400
|
|
H0
|
Gleichstrom (Rundmotor)
|
1.500
|
---
|
|
H0
|
Wechselstrom
|
500
|
---
|
|
0
|
Gleichstrom
|
1.000
|
800
|
|
I
|
Gleichstrom
|
1.000
|
800
|
|
II, G
|
Gleichstrom
|
ab 1.000, bis über 5.000
|
|
Beachten Sie: Die Angaben dienen lediglich zur Orientierung, die tatsächlichen Werte können deutlich abweichen. Bei älteren Motoren hat der Verschleiß eine erhöhte Stromaufnahme zur Folge (das ist in der Tabelle berücksichtigt). Bei überdurchschnittlichem Verschleiß oder mechanischen Schäden am Getriebe kann der Motorstrom jedoch noch erheblich höher liegen!
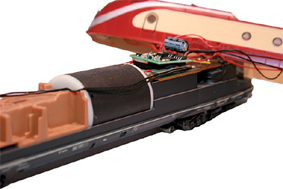
Abbildung: Gerade (ältere) Lokmodelle wie dieser H0-Intercity halten schon mal eine Überraschung bereit: Der große, runde Gleichstrommotor verbraucht bauartbedingt beim Anfahren mehr als 1.500 mA Strom – womit der maximale Strom üblicher H0-Decoder deutlich überschritten ist. Für diese Art von Motoren haben wir den Lokdecoder LD-G-34 plus entwickelt, der bis 3.000 mA Motorstrom liefern kann und trotzdem H0-typische Abmessungen hat.
Tipp: Motorstrom messen
A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P | Q | R | S | T | U | V | W | X | Y | Z
In CV11 wird für Fahrzeugdecoder die Maximalzeit ohne Datenempfang eingestellt (--> RailCommunity-Norm RCN-225 "DCC-Konfigurationsvariablen"). In dieser auch als "Packet Time-Out" bezeichneten Konfigurationsvariablen wird die Zeitdauer festgelegt, nach der der Decoder in den alternativen Betrieb wechselt, wenn er keine digitalen Signale mehr empfängt. Wie der "alternative Betrieb" abläuft, hängt von weiteren CV-Einstellungen ab:
- Bei aktiver automatischer Analogerkennung wechselt der Decoder nach der eingestellen Zeit in den Analog-Betrieb.
- Ist die Analogerkennung deaktiviert, wird der Lokmotor nach Ablauf der Zeit ausgeschaltet.
Besondere Aufmerksamkeit verdienen Decoder, die über eine Pufferschaltung mit "Notstrom" versorgt werden. Der Puffer würde auch nach dem Abschalten der Gleisspannung (z.B. bei einem Nothalt oder einem Signalstopp) dafür sorgen, dass die Lok noch weiterfährt. Um das zu verhindern, muss beim Einsatz einer Pufferschaltung
- für das Packet Time-Out ein niedriger Wert eingestellt und
- die automatische Analogerkennung deaktiviert werden.
Pendelbetrieb, Pendelstrecke, Pendelzugsteuerung
Analoge Anlagen:
Über eine externe Steuerung kann in analogen Anlagen der automatische Pendelbetrieb zwischen zwei Endbahnhöfen gesteuert werden. Da der Richtungswechsel in Gleich- und Wechselstromanlagen auf verschiedene Weise ausgeführt wird, sind die Steuermodule entweder für den Einsatz in 2- oder 3-Leiter-Anlagen geeignet.
Digitale Anlagen:
Der Einsatz eines externen Steuermoduls (vergleichbar mit einer Pendelzugsteuerung für analoge Anlagen) ist in digitalen Anlagen nicht möglich, da dann widersprüchliche Befehle hinsichtlich Fahrtrichtung oder Geschwindigkeit von der Digitalzentrale und der Pendelzugsteuerung gesendet würden. Zur Realisierung eines Pendelzugbetriebes in digitalen Anlagen gibt es folgende Lösungen:
- Abtrennen der Pendelstrecke von der Digitalsteuerung und Ansteuerung mit einer Pendelzugsteuerung für analoge Anlagen.
- Konfiguration einer Pendelautomatik in der Digitalzentrale (sofern die Zentrale das ermöglicht) in Kombination mit digitalen Rückmeldern (z.B. s88) an der Pendelstrecke.
- Einsatz eines Lokdecoders mit Pendelautomatik (z.B. Lokdecoder der Serie 30 plus).
- Einsatz eines Lokdecoders, der auf Basis des ABC-Bremsverfahrens einen Pendelbetrieb ermöglicht (z.B. Lokdecoder LD-G-43).
Pendelautomatik
>>> Lokdecoder der Serie 30 plus
Unsere Lokdecodern der Serie 30 plus haben eine integrierte Pendelautomatik. Die beiden Schalteingänge der Decoder steuern dabei die End- und Zwischenhalte im Pendelbetrieb. Der Pendelautomatik kann eine Funktionstaste zugeordnet werden, so dass sie im Betrieb ein- und ausgeschaltet werden kann.Ablauf: Sobald der zugeordnetete Schalteingang ausgelöst wird (z.B. durch einen Magneten im Gleis in Kombination mit einem Hallsensor oder einem Reedkontakt), bremst die Lok mit der eingestellten Bremsverzögerung. Nach der eingestellten Haltezeit fährt die Lok mit der eingestellten Anfahrverzögerung wieder los. Je nach Einstellung wird intern die Fahrtrichtung gewechselt oder nicht und die Lok fährt in die Gegenrichtung zurück oder in die selbe Richtung weiter.
Bei entsprechender Programmierung wird das Schließen des einen Schalteingangs auf freier Strecke zwischen den Endbahnhöfen von der Pendelautomatik ignoriert und kann während der Pendelfahrt zum Auslösen beliebiger Funktionen verwendet werden. Über den zweiten Schalteingang können zusätzliche Zwischenhalte auf der Pendelstrecke ausgelöst werden.
Für die beiden Schalteingänge (je einer für die beiden Endbahnhöfe und einer für die Zwischenhalte) werden in den CVs eingestellt:- Länge der Haltezeit (0 bis max. 160 Sekunden), entweder gemeinsam für beide Fahrtrichtungen oder getrennt für Vorwärts- und Rückwärtsfahrt
- ob nach dem Halt ein Richtungswechsel ausgeführt wird oder nicht;
- Zwischenhalte ausführen in beiden Fahrtrichtungen oder nur bei der Hinfahrt oder nur bei der Rückfahrt.
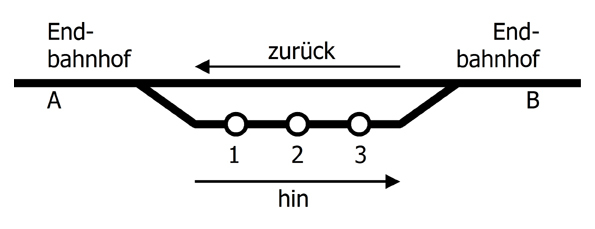 Abbildung: Beispiel für eine Pendelautomatik. Auf der Hinfahrt hält die Lok an 3 Zwischenhalten, auf der Rückfahrt fährt sie ohne Halt zum Endbahnhof 1.
Abbildung: Beispiel für eine Pendelautomatik. Auf der Hinfahrt hält die Lok an 3 Zwischenhalten, auf der Rückfahrt fährt sie ohne Halt zum Endbahnhof 1.
POM-Update
>>> Lokdecoder der Serie 30 plus, Funktionsdecoder
POM-Update ist ein Verfahren, das die Aktualisierung der Firmware des Decoders (= der spezifischen Software des Decoders) ohne Ausbau des Decoders und ohne Einsatz eines speziellen Gerätes ermöglicht. POM-Update basiert auf der Hauptgleis-Programmierung (POM) für das DCC-Format.
Voraussetzungen für die Nutzung des Verfahrens sind:
-
Digitalzentrale mit PC-Interface, die das DCC-Format und POM unterstützt. Hinweis: Da fast jeder Zentralen-Hersteller ein eigenes Verfahren nutzt, um eine Hauptgleis-Programmierung auszuführen, ist das POM-Update derzeit nur mit folgenden Zentralen möglich (Stand: 01/2015): MasterControl (Tams Elektronik), Intellibox 1 (Uhlenbrock), CS2 (Märklin).
- PC. Das Betriebssystem muss Java unterstützen.
-
Software "POM-Updater.exe": Diese ist auf der CD gespeichert, die im Lieferumfang des Fahrzeugdecoders enthalten ist. Sie steht auch auf unserer Homepage zum kostenlosen Downlaod zur Verfügung.
Die aktuelle Firmware-Version des Decoders können Sie kostenlos von unserer Homepage herunterladen.
Programmierung
>>> Fahrzeug-Decoder , Zubehördecoder
Fahrzeugdecoder
Unsere Multiprotokoll-Fahrzeugdecoder können mit DCC-Zentralen über Konfigurationsvariablen (kurz CV) oder mit Motorola-Zentralen über Register programmiert werden. Jeder CV bzw. jedem Register wird dabei ein Zahlenwert zugeordnet. Bei allen Decodern ist im DCC-Format die Programmierung auf dem Programmiergleis (Direct Programming) und die Hauptgleisprogrammieung (POM = Programming on Main) möglich.
Direct Programming: Um Lok- oder Funktionsdecoder für das DCC-Format auszulesen oder zu programmieren, werden sie auf das Programmiergleis gestellt, das an einen speziellen Ausgang der Digitalzentrale angeschlossen ist. Als Programmiergleis ist jedes handelsübliche Gleisstück geeignet.
PoM (Programming on main oder Hauptgleis-Programmierung): Diese Variante der Programmierung für das DCC-Format ermöglicht es, Fahrzeugdecoder direkt auf der Anlage zu programmieren (anstatt die Fahrzeuge auf ein spezielles Programmiergleis zu setzen). Vorteil dieser Lösung ist z.B., dass alle Änderungen, die das Fahrverhalten beeinflussen, unmittelbar geprüft werden können.
Registerprogrammierung für das DCC-Format: Diese Art der Programmierung wird nur noch von einigen älteren Zentralen verwendet. Einige unserer Decoder unterstützen auch diese Art der Programmierung.
Programmierung mit Zentralen mit beschränkten Eingabewerten: Durch Verwendung von Hilfsregistern können viele Decoder auch mit Zentralen, die lediglich Eingabewerte bis 80 oder 99 zulassen, in vollem Umfang programmiert werden.
Zubehördecoder
Grundlage für die Vergabe der Adressen ist ist ein 4-fach-Zubehördecoder, der 4 Ausgangspaare (z.B. Weichen) schaltet. Daraus resultiert, dass jeder Decoderadresse vier Weichenadressen mit 4 aufeinanderfolgenden Nummern zugeordnet werden.
Die Programmierung der Adresse eines Zubehördecoders über die (DCC-) Konfigurationsvariablen ist daher etwas Nachdenken, da einer Decoderadresse (z.B. 10) vier Weichenadressen (z.B. 37, 38, 39, 40) zugeordnet werden. Die Tatsache, dass manche Hersteller bei der Nummerierung der Zubehördecoder-Adressen mit "0", andere mit "1" beginnen, macht es darüberhinaus nicht einfacher.
Daher die dringende Empfehlung: Bei vielen Decodern ist es möglich, den Decoder durch Aufrufen einer beliebigen Adresse aus einem 4-er Adressblock "anzulernen", nachdem er zuvor mit einem Taster oder durch Setzen eines Jumpers in den Programmiermodus versetzt wurde. Wenn diese Option vorhanden ist, sollten Sie sie nutzen!
>>> Fahrzeug-Decoder
Eine unterbrechungsfreie Stromversorgung der Fahrzeugdecoder kann nicht immer sichergestellt werden. Mögliche Ursachen sind z.B.
- Roststellen oder Verschmutzungen auf den Schienen
- das Überfahren von Weichen
- abgenutzte oder unzureichende Stromabnehmer am Fahrzeug
Mögliche Folgen der kurzen Stromunterbrechungen sind z.B.
- flackernde Fahrzeugbeleuchtungen
- Störungen der Soundwiedergabe
- Aussetzer der Fahrzeugmotoren (bis hin zum Stillstand der Fahrzeuge)
Um Fahrzeugdecoder im Bedarfsfall mit Strom zu versorgen, können externe Stützelkos (Pufferelkos) angeschlossen werden – vorausgesetzt die Decoder haben entsprechende Anschlüsse. Die Kapazitäten von Stützelkos, die direkt an die Decoder angeschlossen werden, liegen typischerweise zwischen 100 und 470 µF, bei manchen Decodern auch bei 1.000 µF. Bei einem hohen Strombedarf reichen die Kapazitäten dieser Stützelkos jedoch häufig nicht aus.
Super-Caps für einen hohen Strombedarf
Super-Caps haben trotz vergleichsweise geringer Abmessungen deutlich höhere Kapazitäten als Elkos. Werte von 0,47 F (= 470.000 µF) und mehr sind üblich. Um die Super-Caps auf der Modellbahn einsetzen zu können, sind jedoch einige Punkte zu beachten:
-
Da ihre Spannungsfestigkeit bei nur 2,5 bis 6 V liegt, sind sie für den direkten Anschluss an Fahrzeugdecoder nicht geeignet. Es sind daher zwingend spezielle Pufferschaltungen (z.B. USV-mini) erforderlich.
-
Beim Einschalten der Anlage würden die hohen Ladeströme mehrerer Super-Caps die Booster überlasten und damit zur permanenten Überstromabschaltung führen. Damit das nicht passiert, können verschiedene Maßnahmen kombiniert werden: Begrenzung des Ladestroms, Unterbrechung des Ladevorgangs bei einem Einbruch der Gleisspannung oder zeitversetzter Start der Ladevorgänge. "Zuständig" für diese Maßnahmen sind die Pufferschaltung und ggf. der Fahrzeugdecoder.
-
Um in Halteabschnitten, in denen die Gleisspannung komplett ausgeschaltet wird, einen exakten Halt zu ermöglichen, muss für den Fahrzeugdecoder ein niedriger Wert für das Packet Time-Out eingestellt werden. Der Wert legt die Zeit fest, die zwischen dem Empfang eines Digitalsignals und dem (erzwungenen) Ausschalten des Motors vergeht.
PWM-Periode
>>> Lokdecoder
Die Impulse, mit denen ein Lokdecoder den Motor ansteuert, werden mit einer bestimmten Frequenz wiederholt. Diese Frequenz wird durch die PWM-Periode festgelegt. Die "richtige" PWM-Frequenz ist vor allem von der Motorart abhängig. Einige Lokdecoder bieten die Möglichkeit, die PWM-Frequenz an die individuellen Motoreigenschaften anzupassen.
Übliche PWM-Frequenzen für Lokmotoren:- Gleichstrommotor: min. 20 Hz, max. 40 kHz
- Glockenankermotor: min. 6 kHz, max. 40 kHz
- Wechselstrommotor: min. 50 Hz, max. 500 Hz

>>> Digitalsteuerung, Rückmeldung
RailCom ist ein Protokoll zur bi-direktionalen Kommunikation in digitalen Modellbahnanlagen, die im DCC-Format gesteuert werden. Es ermöglicht z.B. die Rückmeldung der Adresse und der CV-Einstellungen von den Decodern zur Digitalzentrale oder zu speziellen Empfängerbausteinen (Detektoren). Die Decoder müssen dafür ausgelegt sein, die sogenannten RailCom-Messages zu senden. Booster müssen das so genannte RailCom-Cutout beherrschen.
Das Versenden von RailCom-Messages ist nur in Anlagen möglich, in denen ein DCC-Signal an den Schienen anliegt. Die Nutzung der RailCom-Funktion ist in einer reinen Motorola-Umgebung nicht möglich.
Die RailCommunity (Verband der Hersteller Digitaler Modellbahn-Produkte) hat den Rückmelde-Standard RailCom zwischenzeitlich in RCN-217 genormt.
RailCom und Fahrzeugdecoder:
Alle unsere Lok- und Funktionsdecoder (außer FD-LED) sind RailCom-fähig. Über RailCom werden Daten über die Schiene von den Decodern zur Zentrale oder zu speziellen Empfängerbausteinen zurückgemeldet. Der Decoder ist damit nicht mehr nur Empfänger von Befehlen, sondern auch Sender von Rückmeldedaten.
Unsere RailCom-fähigen Lok- und Funktionsdecoder senden
- auf Kanal 1: fortlaufend ihre (Basis-, erweiterte oder Consist-) Adresse (sogenanntes RailCom Broadcast Datagramm) und
-
auf Kanal 2: auf einen entsprechenden Auslesebefehl hin eine CV-Meldung.
-
einige Decoder können auch die gerade gefahrene Geschwindigkeit übertragen.
Die ab Mitte 2015 gefertigten Lokdecoder der Serie 30 plus und der Funktionsdecoder FD-R Basic 2 senden außerdem per RailCom die Qualität der empfangenen Digitalsignale. Mit Hilfe dieser Funktion lässt sich ermitteln, ob die Empfangsqualität dauerhaft (z.B. wegen schlechter Stromaufnahme der Lok) oder nur örtlich begrenzt (z.B. an Weichen) beeinträchtigt ist.
RailCom und Zubehördecoder
Die Zubehördcoder senden RailCom-Messages über die Schienen an spezielle RailCom-Detektoren oder die Digitalzentrale. Nach einem Schalt- oder Stellbefehl an ihre Adresse senden sie z.B.
-
Statusmeldung, z.B. "Weiche steht richtig", "Habe Weiche geschaltet" oder "Weiche muss noch geschaltet werden" und / oder
-
Zeitmeldung ("Brauche für die Ausführung des Stell- oder Schaltbefehls noch 2 Sekunden") und / oder
-
Fehlermeldung, z.B. "Weiche kann nicht gestellt werden"
und quittiert damit auch den Empfang des Befehls.
Bei Einsatz von endabgeschalteten Weichen oder Servo-gesteuerten Weichen mit Endkontakt melden die Decoder die tatsächliche Stellung von Weichen (auch nach einer Verstellung von Hand).
RailCom und Booster:
Um Platz für die Übertragung der Rückmeldedaten in RailCom-überwachten Abschnitten zu schaffen, muss in den Datenstrom von der Zentrale zu den Decodern eine Lücke geschnitten werden (das sogenante RailCom-Cutout). Dieses RailCom-Cutout wird von den Boostern bereitgestellt. In Anlagen, in denen die Booster das nicht können, ist eine Rückmeldung über RailCom daher nicht möglich.
Beim Einsatz von RailCom-Boostern mit Zentralen, die ein DCC-Signal senden und nicht RailCom-fähig sind, kann das RailCom-Cutout zu Störungen bei der Datenübertragung führen. Einige ältere DCC-Fahrzeugdecoder und einige aktuelle DCC-Decodertypen (v.a. von US-amerikanischen Herstellern), die nicht für den Einsatz mit RailCom konzipiert sind, reagieren bei eingeschaltetem RailCom-Cutout nicht korrekt auf Fahrbefehle. Bei nicht RailCom-fähigen DCC-Sounddecodern kann die Soundwiedergabe gestört sein.
Einige Booster bieten daher die Möglichkeit, RailCom ein- oder auszuschalten. In Kombination mit reinen Motorola-Zentralen sind Störungen der Datenübertragung durch das RailCom-Cutout prinzipbedingt ausgeschlossen.
RailCom plus 
>>> Digitalsteuerung, Rückmeldung
RailComPlus ist eine aktuelle Weiterentwicklung des Rückmeldestandards RailCom, der die automatische Anmeldung der (RailComPlus-) Decoder, die sich auf der Anlage befinden, ermöglicht.
RailCommunity
>>> Digitalsteuerung
In der RailCommunity arbeiten diverse Hersteller digitaler Modellbahn-Produkte zusammen. Ihre Ziele sind
- ein besseres Zusammenspiel von Digitalkomponenten verschiedener Hersteller zu erreichen,
- die Anwendung der Digitaltechnologie für den Anwender einfacher zu gestalten,
- für zukünftige Entwicklungen eine gemeinsame Basis zu schaffen.
Um diese Ziele zur erreichen, werden Arbeitsgruppen und Fachforen eingerichtet sowie Normen, technische Hinweise und Anwendungsrichtlinien erstellt.
Die von der RailCommunity verabschiedeten Normen sind am Kürzel "RCN" zu erkennen.
Die Arbeit der RailCommunity basiert auf den Normen der amerikanischen NMRA (National Model Railroad Association) und entwickelt diese in Zusammenarbeit mit der NMRA weiter.
Rangiergang und Rangierfunktion
>>> Lokdecoder
Über eine Funktionstaste können Sie in den Rangiergang umschalten, der die Geschwindigkeit aller Fahrstufen gegenüber der eingestellten Geschwindigkeitskennlinie prozentual verringert (meistens um 50 %). Bei entsprechender Programmierung wird gleichzeitig:
- das Rangierlicht (weiße, nicht fahrtrichtungsabhängige Stirn- und Schlussbeleuchtung) eingeschaltet und
- die Anfahr- und Bremsverzögerung ausgeschaltet.
A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P | Q | R | S | T | U | V | W | X | Y | Z
s88 ist das einfachste Bussystem zur Rückmeldung von Daten von der Modelleisenbahn zum PC. Bei PC-gesteuerten Anlagen ist die Rückmeldung über den s88-Bus weit verbreitet, viele Digitalzentralen haben einen (meist 6-poligen) Anschluss für das s88-Kabel. Die Rückmeldung über den s88-Bus ist sowohl in Wechselstrom- als auch in Gleichstromanlagen gebräuchlich - unabhängig vom verwendeten Digitalformat.
An die meisten Rückmeldemodule können bis zu 16 Eingänge angeschlossen werden, deren Zustand (offen oder mit Masse verbunden) zum Empfänger (Interface oder Zentrale) gemeldet wird. Mehrere Rückmeldemodule können in Reihe angeschlossen werden, die maximale Anzahl ist vom Empfänger abhängig (z.B. 52 bei der MasterControl).
Das s88-Rückmeldesystem
- ist einfach aufgebaut und daher sehr kostengünstig;
- ist bei Verwendung gut abgeschirmter Patch-Kabel mit RJ-45 Anschlüssen entsprechend dem Standard S88-N absolut sicher;
- ist in der Lage, die Daten ausreichend schnell weiterzuleiten;
- ermöglicht bei Verwendung gut abgeschirmter Patch-Kabel einepraktikable Leitungsverlegung;
- ist bei Verwendung entsprechenden Komponenten (z.B. Rückmeldemodul S88-4) sehr flexibel.
Tipp: Grundlagen-Wissen s88 als Infothek-Blatt zum kostenlosen Download.
s88-N
>>> Digitalsteuerung, Rückmeldung
Der Standard s88-N regelt die Belegung von Patchkabeln mit RJ 45-Anschlüssen bei Verwendung in s88-Rückmelde-Systemen. Diese in Computer-Netzwerken gebräuchlichen Kabel sind im Vergleich zu den früher üblichen 6-adrigen Kabeln gut abgeschirmt und verhindern auch bei großen Leitungslängen Störungen durch fremde elektrische Signale aus anderen Daten- oder Signalleitungen.
Alle Module, die diesem Standard entsprechen, sind zueinander kompatibel.
Weitere Informationen: www.s88-n.eu
Tipp: Grundlagen-Wissen s88 als Infothek-Blatt zum kostenlosen Download.
Schaltausgänge und Effekte der Schaltausgänge
>>> Lokdecoder, Funktionsdecoder
 Zum Standard heutiger Lok- und Funktionsdecoder gehören zwei Ausgänge zum Anschluss der vorderen und der hinteren Lokbeleuchtung, die richtungsabhängig geschaltet werden können.
Zum Standard heutiger Lok- und Funktionsdecoder gehören zwei Ausgänge zum Anschluss der vorderen und der hinteren Lokbeleuchtung, die richtungsabhängig geschaltet werden können.
Lok- und Funktionsdecoder können darüber hinaus weitere Schaltausgänge haben, an die z.B. Fahrzeuginnenbeleuchtungen, elektrische Kupplungen oder Rauchgeneratoren angeschlossen werden können.
Je nach Ausführung des Fahrzeugdecoders können Sie den Ausgängen besondere Effekte zuordnen:
- Blinken und Doppelblinken: Die Frequenz und das Tastverhältnis der Blinklichter können eingestellt werden. Anwendungsbeispiel: Einzel- und Wechselblinklichter oder Strobe (Aufblitzen).
- Dimmen = Reduzierung der anliegenden Spannung. Anwendungsbeispiel: Die für den Analogbetrieb vorgesehenen Lämpchen älterer Fahrzeuge können gedimmt werden und müssen dann nach dem Einbau des Decoders nicht ausgetauscht werden.
- Fahrstufenabhängiges Dimmen = Reduzierung der Spannung in Abhängigkeit von einer (in den CVs definierten) Fahrstufe. Damit lässt sich z. B. eine schwache Rauchentwicklung beim Halt oder eine ausgeschaltete oder gedimmte Führerstandsbeleuchtung während der Fahrt realisieren.
- Kicken = Reduzierung der anliegenden Spannung, nach einer (in den CVs definierten) Zeit von max. 12, 5 Sekunden. Die Funktionsausgänge erhalten dann zunächst für die eingestellte Zeit die volle Spannung und werden dann ausgeschaltet. Anwendungsbeispiel: Bei einigen Typen elektrischer Kupplungen wird die volle Spannung zum Entkuppeln benötigt. Um die Kupplungen zu schonen, muss anschließend die Spannung ausgeschaltet werden.
- Rangierlicht = weiße Stirn- und Schlussbeleuchtung. Die Ausgänge können so programmiert werden, dass sie während des Rangierbetriebs (schaltbar mit F3 oder F4) grundsätzlich eingeschaltet sind. Die Fahrtrichtungsabhängigkeit dieser Ausgänge ist während des Rangierbetriebs aufgehoben.
- Sonderfunktion für Fahrstufe 0 = automatisches Schalten von Funktionen bei Fahrstufe 0. Eine Funktion kann so programmiert werden, dass sie bei Fahrstufe 0 andere Funktionen abschaltet und bestimmte Funktionsausgänge einschaltet. Anwendungsbeispiel: In manchen BWs ist es üblich, dass bei kurzfristig abgestellten Loks vorn und hinten das Schlusslicht eingeschaltet wird.
- MARslight (= auf- und abschwellende Lichtstärke): Anwendungsbeispiel: amerikanische Loks mit dieser Art von Beleuchtung.
- Analogbetrieb = Festlegung, ob ein Ausgang im Analogbetrieb ein- oder ausgeschaltet ist.
- Invertiertes Schalten. Bei Stellung "on" wird die zugeordnete Funktion ausgeschaltet, bei Stellung "off" eingeschaltet
Schaltausgänge, maximaler Strom
>>> Lokdecoder, Funktionsdecoder, Zubehördecoder
Genauso wie der Motorstrom ist der Strom, den der Decoder an seinen Ausgängen bereitstellen kann, begrenzt. Wird der Strom überschritten, werden die zugehörigen Ausgangstreiber auf dem Decoder beschädigt. Übliche Werte für den maximalen Strom pro Schaltausgang sind 100 mA (bei Decodern für kleine Nenngrößen), 300 mA (bei Decodern für Nenngröße TT oder H0) oder >500 mA (bei Decodern für H0 oder größer).
Übliche Verbrauchswerte von Zusatzgeräten:
- LED (auch mehrere, in Reihe geschaltete LEDs): 10 … 20 mA
- Glühlampe: 30 … 100 mA. ACHTUNG! Beim Einschalten verbraucht eine Lampe mehr als das Doppelte des auf dem Sockel angegebenen Nennstroms. Als Richtwert kann man davon ausgehen, dass der Nennwert der Glühlampe maximal ½ so groß sein sollte wie der maximale Strom des Funktionsausgangs.
- LED-Wageninnenbeleuchtung: ab 70 mA
- Rauchgenerator: ab 70 mA. ACHTUNG! Kurz nach dem Einschalten verbraucht ein Rauchgenerator ein Mehrfaches des angegebenen Nennstroms. Als Richtwert kann man davon ausgehen, dass der Nennwert des Rauchgenerators maximal ½ so groß sein sollte wie der maximale Strom des Funktionsausgangs.
- Telex-Kupplung (ältere Versionen): min. 300 mA
Empfehlenswert ist in jedem Fall, die tatsächlichen Werte anhand der technischen Daten des Gerätes zu prüfen.
Schaltdecoder
>>> Zubehördecoder (stationäre Decoder)
Schaltdecoder können je nach Ausführung
- zwischen zwei Verbrauchern, die an ein Ausgangspaar angeschlossen sind, umschalten (z.B. Weichen mit motorischem Antrieb und Endabschaltung oder Lichtsignalen) oder
- die beiden Ausgänge eines Paares unabhängig voneinander ein- und ausschalten.
Schaltdecoder mit integrierten Relais funktionieren wie ein ferngesteuerter (Um-)Schalter. Der Strom für die Verbraucher muss extern bereitgestellt werden. Die Relais sorgen dabei für eine galvanische Trennung zwischen Digitalsystem und nachgeschalteten Komponenten. Sie können daher z.B. eingesetzt werden um
- Gleisabschnitte abzuschalten
- nachrangige Steuerungen (z.B. Beleuchtungsmodule) ein- und auszuschalten
Decoder ohne Relais versorgen die angeschlossenen Verbraucher direkt mit Gleichstrom. Diese Variante ist für den Anschluss von Komponenten geeignet, die wenig Strom verbrauchen, z.B. LEDs in Lichtsignalen.
Schalteingänge
>>> Lokdecoder der Serie 30 plus, Funktionsdecoder FD-R Extended
Die Schalteingänge schalten z.B. zugeordnete Ausgänge, sobald sie mit Decodermasse verbunden werden (z.B. über Reedkontakte oder Hall-Sensoren in Kombination mit Dauermagneten im Gleis). Sie können eingesetzt werden, um Funktionen automatisch auszulösen, z.B.
- das Signalhorn oder den Pfiff an der Tunneleinfahrt,
- die Glocke am Bahnübergang.
Außerdem werden die Schalteingänge verwendet, um eine Pendelzugautomatik einzurichten.
Schnittstellen
- für Lokdecoder
- für Booster
Servo
>>> Modellbau allgemein
Die Servos (auch als Servomotoren bezeichnet), die im Modellbau üblicherweise eingesetzt werden, bestehen aus einem Verbund aus einem Servomotor und einer Elektronik zur Ansteuerung des Motors. Der Motor kann in beide Drehrichtungen verschiedene Winkelpositionen anfahren und beibehalten, die von der Ansteuerelektronik vorgegeben werden.
Ansteuerelektronik
Die Ansteuerelektronik basiert auf einer Pulsweitenmodulation, deren Pulsweite den Soll-Stellwinkel des Motors vorgibt. Während des Stellvorgangs wird fortlaufend der Ist-Stellwinkel des Motors mit dem Soll-Stellwinkel verglichen. Weicht der Ist- vom Sollwert ab, wird der Motor mit maximaler Geschwindigkeit in diejenige Richtung gedreht, die den kürzeren Verfahrweg zum Sollwert darstellt. Diese Prozedur wird so lange wiederholt, bis der Istwert innerhalb der Toleranzen des Sollwertes liegt.
Positionsregelung
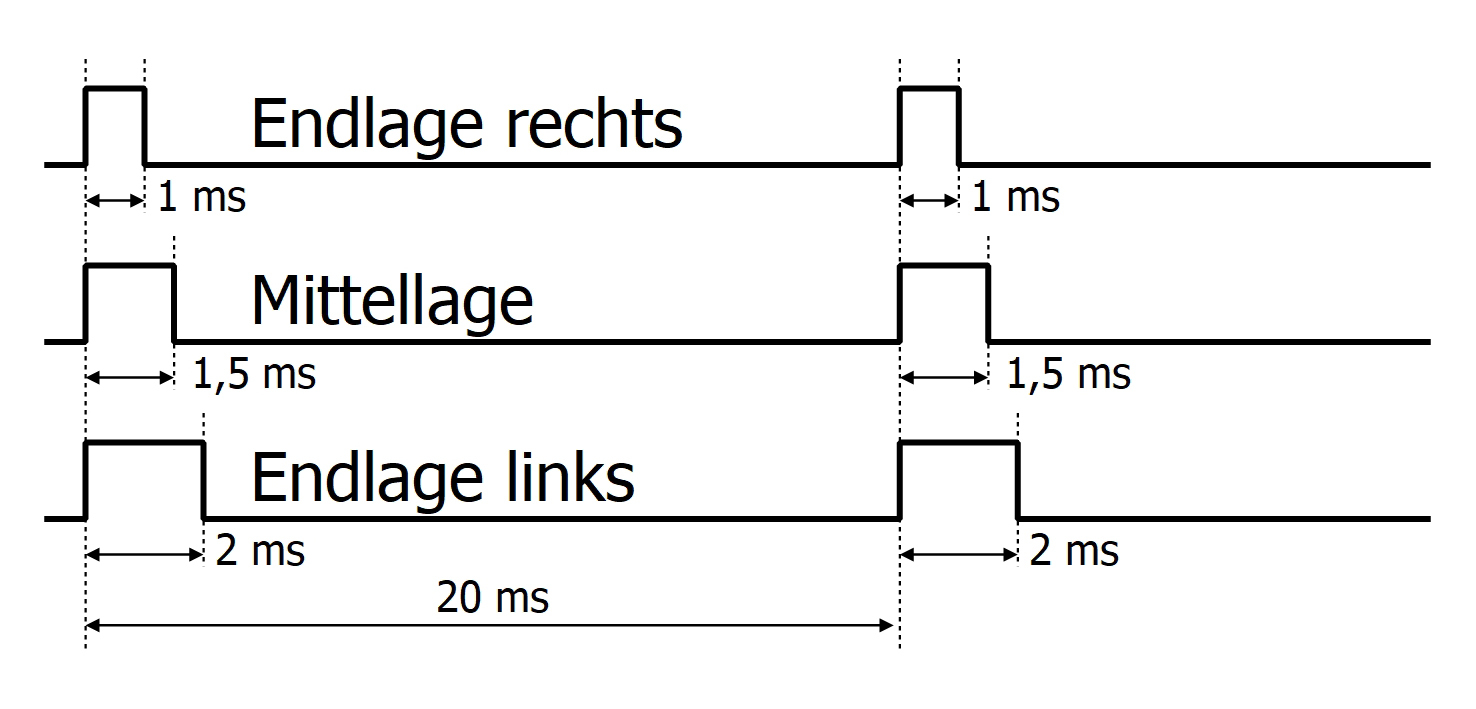 Die Ansteuersignale werden im Rhythmus von 20 ms gesendet. Die Pulsdauer des gesendeten Signals bestimmt die anzufahrende Position des Servos: ein Signal von 1 ms Länge definiert die Anfangsposition, eines von 2 ms Länge die Endposition. Zur Ansteuerung von Zwischenpositionen werden Signale mit entsprechend angepasster Länge gesendet. Zur Erzeugung einer langsamen, gleichmäßigen Bewegung muss der Weg von der Anfangs- zur Endpositon über möglichst viele Zwischenschritte zurückgelegt werden. Zur Ansteuerung der Zwischenschritte werden die Signallängen interpoliert.
Die Ansteuersignale werden im Rhythmus von 20 ms gesendet. Die Pulsdauer des gesendeten Signals bestimmt die anzufahrende Position des Servos: ein Signal von 1 ms Länge definiert die Anfangsposition, eines von 2 ms Länge die Endposition. Zur Ansteuerung von Zwischenpositionen werden Signale mit entsprechend angepasster Länge gesendet. Zur Erzeugung einer langsamen, gleichmäßigen Bewegung muss der Weg von der Anfangs- zur Endpositon über möglichst viele Zwischenschritte zurückgelegt werden. Zur Ansteuerung der Zwischenschritte werden die Signallängen interpoliert.
Anschlüsse
|
Anschluss
|
Kurz-
bezeichnung
|
Kenn-
zeichen
|
Kabelfarbe
|
|
Spannung-
versorgung
|
"GND"
|
-
|
schwarz oder braun
|
|
"VCC"
|
+
|
rot
|
|
|
Impuls
|
"PW"
|
|
weiß oder orange
|
Die Belegung der elektrischen Anschlüsse von Servos, Steckerformen und Drahtfarben sind nicht einheitlich festgelegt.
Analog- und Digitalservos
Die Ansteuerungselektronik kann digital oder analog aufgebaut sein. Digitalservos steuern die Servoposition meist schneller und präziser an und haben eine höhere Winkelauflösung. Außerdem ist das "Einschalt-Zucken" deutlich geringer als bei analogen Servos. Allerdings sind sie i.d.R. teurer als Analogservos.
Servoansteuerung
>>> Zubehördecoder, Fahrzeugdecoder, analoge Servoansteuerungen
Um Servos ansteuern zu können, muss an den Ausgängen des Steuermoduls eine Pulsweitenmodulation erzeugt werden. Zur Ansteuerung von Servos kommen in Frage:
-
analoge Servoansteuerungen: Ansteuerung des Servos über Taster
-
stationäre Servo-Decoder: Ansteuerung des Servos über digitale Weichen-Stellbefehle, ggf. zusätzlich analog über Taster
-
Fahrzeugdecoder mit Servo-Ausgang: Ansteuerung des Servos über digitale Schaltbefehle (Funktionstasten)
Der Bewegungsablauf folgt einer in der Software des Steuermoduls definierten Zeit-Orts-Kurve. Je nach Ausführung des Steuermoduls ist diese Kurve fest definiert oder kann individuell angepasst werden.
Der Verlauf der Zeit-Orts-Kurve kann
- geradlinig zwischen den beiden Endpunkten verlaufen,
- eine Verzögerung am Anfang und Ende des Bewegungsablaufs beinhalten,
- oder komplexe Bewegungsabläufe (z.B. das Nachwippen von Schranken und Formsignalen) nachbilden.
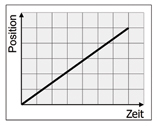 |
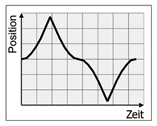 |
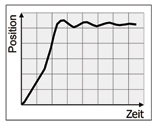 |
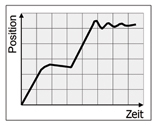 |
|
linear
(z.B. für Weichen,
Wasserkräne, Tore)
|
Kinderwippe |
Schranke
oder Flügelsignal
mit Nachwippen
|
Schranke mit Nachwippen und Umgreifen
des Stellwerkers
|
Servo-Ausgang
>>> Fahrzeugdecoder
Servos können nicht über normale Schaltausgänge von Fahrzeugdecodern angesteuert werden, da für ihre Ansteuerung eine Pulsweitenmodulation erforderlich ist. Eine Reihe von Fahrzeugdecodern haben spezielle Ausgänge, die die Signale zur Ansteuerung eines Servos übertragen. Damit können mit Lok- oder Funktionsdecodern z.B. die Bewegungen von Pantographen, Entkupplern oder Türen per Funktionstaste ausgelöst werden.
Die Endlagen und die Stellgeschwindigkeit werden über CVs definiert. Die Steuerung des Servos erfolgt durch:
- Betätigen der Funktionstasten ("on" = Endlage 1 , "off" = Endlage 2) oder
- Eingabe eines Wertes für den Stellwinkel über POM, wodurch jeder beliebige Winkel angefahren werden kann.
Hinweis: Fahrzeugdecoder können am Servoausgang nicht den Strom zum Betrieb des Servos bereitstellen. Daher ist eine externe Spannungsversorgung für den Servo erforderlich, z.B. eine Servoplatine.
>>> Zubehördecoder (stationäre Decoder)
Servodecoder setzen die (Weichen-) Stellbefehle in Signale zur Ansteuerung von Servos in Weichen, Toren, Schranken, Formsignalen oder Wippen um.
Sonderfunktionen für Fahrstufe 0
>>> Lokdecoder, Funktionsdecoder
Durch Programmierung der Sonderfunktionen für Fahrstufe 0 können mehrere Funktionsausgänge und Funktionen gleichzeitig ein- oder ausgeschaltet werden, die sonst einzeln geschaltet werden müssten. Es können so z.B. beim Abstellen der Lok im BW mit einer Funktionstaste mehrere Beleuchtungen gleichzeitig geschaltet werden (Stirn- und Schlussbeleuchtungen, Führerstands- und Fahrwerksbeleuchtung).
Sound | EasySound
>>> EasySound-Module
Die Soundmodule haben eine integrierte Micro-SD-Karte als Datenspeicher, auf der eigene Sounddateien beliebiger Länge (z.B. eigene Aufnahmen, von Tonträgern. etc.) im Waveformat (Dateiendung "wav") gespeichert werden. Die Dateien werden aufgerufen durch
- Funktionstasten (bei Modulen für den Einbau in Fahrzeuge)
- Weichenschaltbefehle (bei stationären Modulen) und / oder
- das Auslösen von Schalteingängen.
Sound | integrierte Basic-Sounds
>>> Lokdecoder der Serie 30 plus, Funktionsdecoder FD-R Extended
In den Prozessoren der Lokdecoder der Serie 30 plus (außer Sounddecoder LD-G-36 plus) und des Funktionsdecoders FD-R Extended sind einige Geräusche gespeichert, die über Funktionstasten und / oder automatisch über die Schalteingänge ausgelöst werden können.
Integrierte Geräusche bei unseren Lokdecodern:
- Signalhorn
- Glocke
- Lokpfiff
Integrierte Geräusche bei unseren Funktionsdecodern:
- Signalhorn
- Glocke
- Türenpiepen
- Pfiff des Zugführers
Sounddecoder | Fahrsound
>>> Lokdecoder LD-G-36 plus | Soundmodul Micro X3
In speziellen ICs auf dem Lokdecoder LD-G-36 plus und dem Soundmodul Micro X3 werden Originalgeräusche eines bestimmten Fahrzeugtyps gespeichert (Dampflok, Diesellok, E-Lok oder mehr als 150 individuelle Fahrzeugtypen). Es handelt sich um Aufnahmen von Original-Geräuschen der entsprechenden Vorbildfahrzeuge. Mit einem speziellem Programmiergerät (Tams Sound Programmer, Art.-Nr. 70-03200) ist es möglich, die Programmierung des Decoders zu ändern.
Über die Funktionstasten der Digitalzentrale können die verschiedenen Geräusche (Stand- und Fahrgeräusch, Signalhorn oder Lokpfeife, Entkupplungs- oder Türschließgeräusch, Glocke oder zweites Signalhorn) abgerufen werden. Die Fahrgeräusche sind geschwindigkeitsabhängig. Über einen Taktgeber (Hall-Sensor oder Reedkontakt in Kombination mit einem Magneten) kann z.B. der Auspuffschlag von Dampfloks radsynchron gesteuert werden.
Die werksmäßigen Voreinstellungen können durch Änderung der Konfigurationsvariablen angepasst werden. Einstellmöglichkeiten:
- Lautstärke
- Auspuffschlag von Dampfloks
- Länge der Pausen zwischen Signaltönen
- Auslöseschwellen bei Motorlaständerung, für Bremsgeräusch und für Lüftergeräusch von E-Loks
- Faderzeit (= Dauer des Ein- und Ausblendens beim Ein- und Ausschalten)
- Empfindlichkeit bei Laständerungen und Leerlaufzeit
- Zuordnung der Geräusche zu den Funktionstasten
>>> DCC-Format, Fahrzeugdecoder
Dieses Verfahren wird eingesetzt, um die Zeit für die Übertragung von Geschwindigkeits-, Richtungs- und Funktionsbefehle an Fahrzeugdecoder im DCC-Format zu reduzieren. Dazu werden
- statt die verschiedenen Befehle jeweils einzeln zu übertragen
- alle Befehle zusammengefasst und in einem einzigen Befehl übertragen.
Vor allem bei Anlagen, auf denen eine größere Zahl von Decodern mit vielen Funktionen zum Einsatz kommt, wirkt sich die Reduzierung der Übertragungszeit positiv aus.
Voraussetzungen für die Nutzung des Verfahrens sind:
- die Verwendung einer Digitalzentrale, die SDF unterstützt
- der Einbau von Fahrzeugdecodern, die SDF unterstützen
- die Einstellung des Fahrstufenmodus 28 / 128 am Decoder.
--> Zubehördecoder
>>> Lokdecoder, Funktionsdecoder
Unsere Fahrzeugdecoder (außer Mini-Decodern) haben spezielle Anschlüsse für zusätzliche externe Stützelkos. Die Stützelkos versorgen die Decoder in Abschnitten mit schlechtem Kontakt zu den Schienen (z.B. an Weichen oder Schmutzstellen) mit Strom und verhindern so z.B. flackernde Beleuchtungen.
Bei der Auswahl des Stützelkos müssen Sie die in den technischen Daten des Decoders angegebene Mindest-Spannungsfestigkeit sowie die Grenzwerte der Kapazität beachten. Wenn Sie Stützelkos mit einer höheren Kapazität einsetzen wollen, benötigen Sie eine zusätzliche Ladeschaltung oder eine Pufferschaltung.
SUSI-Schnittstelle
>>> Lokdecoder, Funktionsdecoder
|
Die Schnittstelle wurde entwickelt, um z.B. Sound- oder Funktionsmodule (bezeichnet als Erweiterungsmodule oder "Slaves") an Fahrzeugmodule (bezeichnet als Hauptmodule oder "Master") anschließen zu können. Die Erweiterungsmodule werden wie ein Teil des Hauptmoduls programmiert, ausgelesen und angesteuert. Die Kennwerte sind in der RailCommunity-Norm RCN-600 definiert. In der Norm sind drei mechanisch und elektrisch verschiedene Versionen beschrieben:
|
|
|
Eine übliche Anwendung ist der Anschluss von externen Sound-Modulen an Lok- oder Funktionsdecoder über die SUSI-Schnittstelle. Der Fahrzeugdecoder überträgt den Zustand der Funktionen und die an der Zentrale eingestellte Fahrstufe an das SUSI-Modul. Dadurch können geschwindigkeitsabhängige Funktionen (z.B. Motorgeräusch) des SUSI-Moduls beeinflusst werden. |
Vorteile dieser Lösung:
|
|
|
|
Mechanische Eigenschaften:Für die SUSI-Schnittstelle wird eine 4-polige Steckverbindung mit sehr kleinen Kontakten und einem Rastermaß von 1,0 mm eingesetzt, die vom Hersteller JST angeboten wird. |
|
Verwirrend ist die Verwendung der Bezeichnungen "Buchse" und "Stecker" bei dieser Steckverbindung:
|
|
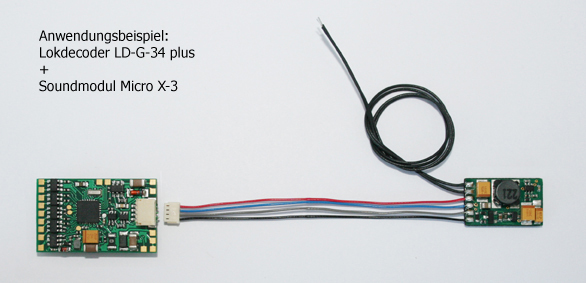
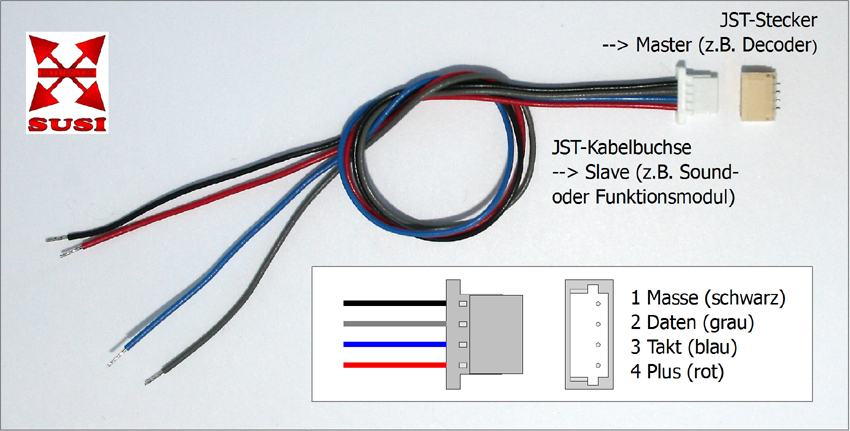
A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P | Q | R | S | T | U | V | W | X | Y | Z
>>> alle Produkte
Die Beachtung der technischen Daten ist für die Lebensdauer einer Schaltung entscheidend. Werden die zulässigen Werte für den Strom (Gesamtstrom, Motorstrom, Strom am Ausgang) oder die Versorgungsspannung überschritten, werden die Schaltungen beschädigt, wenn nicht gar zerstört.
A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P | Q | R | S | T | U | V | W | X | Y | Z
>>> Lokdecoder, Funktionsdecoder
In Fahrzeugdecodern werden z.T. Schutzschaltungen integriert, die mit den Begriffen Überlast-Schutz, Überhitzungs-Schutz oder Kurzschluss-Schutz bezeichnet werden. In den meisten Fällen überwachen sie den Motor- oder Gesamtstrom, seltener den Strom an den einzelnen Funktionsausgängen.
Der Überlastschutz schaltet den Decoder ab, sobald der maximale Gesamtstrom des Decoders bzw. des Motors überschritten wird, jedoch nicht, wenn nur der maximale Strom eines Ausgangs zu hoch ist. Bleibt der Decoder unter Spannung, kann sich das Spielchen in regelmäßigen Abständen wiederholen – ein zunächst rätselhaftes Verhalten.
Ein Überlastschutz für jeden einzelnen der Funktionsausgänge wird bei Fahrzeugdecodern selten ausgeführt. Da der maximale Gesamtstrom durch die Überlast an einem Ausgang meist nicht überschritten wird, hat der Überlastschutz in diesem Fall keine Wirkung.
Eine andere Art, um die Bauteile auf dem Decoder zu schützen, ist der Überhitzungsschutz. Eine Überhitzung kann die Folge einer Überlast sein oder durch schlechte Wärmeableitung entstehen. Die Lok schaltet bei Überhitzung des Decoders ab, fährt nach dem Abkühlen wieder ein Stückchen, bevor sie erneut stehen bleibt.
Ein Kurzschluss-Schutz schaltet den Motor und den Decoder bei einer extremen Überlast ab, die z.B. durch einen Kurzschluss am Motor oder einem externen Gerät hervorgerufenen wurden. Auch der o.g. Überlastschutz reagiert in diesem Fall. Leider ist der Begriff "Kurzschluss-Schutz" irreführend, da bei einem Kurzschluss, bei dem Bauteile auf dem Decoder untereinander oder mit der Gleisspannung kurzgeschlossen werden, die Schutzschaltung keine Wirkung hat.
Hintergrund: Damit die Schutzschaltungen auf dem Decoder reagieren können, muss der Decoder die Überlast, den Kurzschluss oder die Überhitzung messen können. In den folgenden Fällen werden jedoch Bauteile auf dem Decoder kurzgeschlossen oder Bauteile auf dem Decoder unmittelbar durch extreme Überschreitung der internen Arbeitsspannung überlastet, die Schutzschaltungen sind dann wirkungslos:
- Kontakt zwischen dem Decoder und den Schienen oder Metallteilen des Fahrzeugs;
- Kontakt zwischen nicht isolierten Decoder-Anschlusskabeln und den Schienen oder Metallteilen des Fahrzeugs;
- Kontakt zwischen Verbrauchern, die an den Rückleiter für alle Funktionen des Decoders angeschlossen sind, und den Schienen oder Metallteilen des Fahrzeugs.
Überlast-Sicherung
Übertemperatur-Schutz
>>> Booster
Manche Booster schalten bei Überhitzung aus Sicherheitsgründen automatisch ab. Mögliche Ursachen einer Überhitzung sind:
- Behinderung der Wärmabfuhr über das Boostergehäuse;
- deutlich höhere Nennspannung des Trafos als die eingestellte Gleisspannung bei gleichzeitig hoher Stromentnahme.
A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P | Q | R | S | T | U | V | W | X | Y | Z
Watchdog
>>> PC-Steuerung, Booster
Diese Schutzfunktion wird in PC-gesteuerten Anlagen eingesetzt, um zu prüfen, ob die Digitalsignale in einem Booserkreis übertragen werden. Die Zentrale sendet (gesteuert durch die PC-Software) in Abständen von ca. 5 Sekunden einen Weichenstellbefehl an eine Weichenadresse, die dem Booster zugewiesen wurde. Sobald der Booster diese Befehle nicht mehr empfängt, schaltet er sich automatisch ab. Damit wird verhindert, dass der Betrieb auf der Anlage weiterläuft, obwohl die Zentrale (z.B. nach einem Absturz der Zentrale oder des PCs) die Schalt- und Steuerbefehle aus der PC-Software nicht mehr sendet.
>>> Zubehördecoder (stationäre Decoder)
Jeweils zwei Ausgängen eines Zubehördecoders wird eine Adresse zugeordnet. Sie werden über die Stellbefehle
- "Weiche geradeaus" oder
- "Weiche auf Abzweig"
geschaltet. Bei Weichen- und (Um-)Schaltdecodern wird der eine Ausgang eines Ausgangspaares ausgeschaltet, sobald der andere eingeschaltet wird.
Die Adressen der Zubehördecoder sind in Blöcken mit 4 aufeinanderfolgenden Nummern zusammengefasst. Die Programmierung kann mit Hilfe der Zentrale erfolgen (z.B. CV-Programmierung im DCC-Format). Es ist meist auch möglich, den Decoder durch Aufrufen einer Adresse aus einem 4-er Adressblock "anzulernen", nachdem er zuvor mit einem Taster (oder Jumper) in den Programmiermodus versetzt wurde.
Booster mit einem Weichenbefehl ein- und ausschalten
Manche Booster können über Weichenstellbefehle ein- und ausgeschaltet werden, z.B.
- Weiche "geradeaus" --> Booster ein
- Weiche "Abzweig" --> Booster aus
Dazu wird dem Booster eine Weichenadresse zugewiesen.
>>> Weichendecoder, Schattenbahnhofsteuerungen, Pendelzugsteuerungen, Kehrschleifenmodule
Modellbahnweichen können angetrieben werden mit Hilfe von
- Spulen
- Motoren
- Servos
Weichen mit Doppelspulenantrieben
Beim Klassiker unter den Weichenantrieben wird die Weichenzunge mithilfe eines kleinen Metallblocks gestellt, der sich zwischen zwei kleinen Elektromagneten hin- und her bewegt. Zum Schalten ist eine kurzer Stromstoß notwendig. Bei Dauerstrom werden die Antriebe zerstört.
Die meisten Schaltungen sind für die Ansteuerung von Weichen mit Doppelspulenantrieben konzipiert, d.h.
- sie haben 3 Anschlüsse (zwei für die beiden Weichenstellungen und einen für die Spannungsversorgung bzw. den Rückleiter) und
- zum Schalten der Weiche wird der Strom kurz ein- und danach gleich wieder ausgeschaltet.
Motorische Weichen
Bei diesem Weichenantrieb wird die Weichenzunge von einem kleinen Elektromotor (über eine Zahnstange) bewegt. In welche Richtung die Weichenzunge bewegt wird, hängt von der Polarität ab. Wie lange es dauert, bis eine Weiche gestellt ist, hängt von der Bauart ab (Antriebe mit Schneckengetriebe brauchen z.B. besonders lange). Schaltungen für die Ansteuerung von motorischen Weichen
- müssen 2 Anschlüsse für den Motor haben und
- die Schaltzeit sollte einstellbar sein.
Schaltungen, die für die Ansteuerung von Weichen mit Doppelspulenantrieben konzipiert sind, können mit Hilfe eines Adapters auch für die Ansteuerung motorischer Weichen verwendet werden. Der Adapter muss auf die Weichenschaltung abgestimmt sein ("positiv" oder "negativ"). Ein Beispiel für den Anschluss eines Weichenmotors an eine positiv geschaltete Steuerung:

Servogetriebene Weichen
Servos werden mit einer speziellen Elektronik angesteuert. Steuerungen, die dieses "Servosignal" bereitstellen, gibt es sowohl für analoge als auch digitale Anlagen.
--> Servoansteuerung
Weichendecoder
>>> Zubehördecoder (stationäre Decoder)
Oft werden Magnetartikeldecoder vereinfacht als Weichendecoder bezeichnet, was jedoch im Grunde unpräzise ist. Um Weichen zu schalten, kommen verschiedene Varianten zum Einsatz:
- Magnetartikeldecoder für Weichen mit Doppelspulenantrieben
- Weichendecoder für Weichen mit motorischen Antrieben
- Servodecoder für Weichen mit Servo-Antrieben
--> Weichenantriebe
A | B | C | D | E | F | G | H | I | J | K | L | M | N | O | P | Q | R | S | T | U | V | W | X | Y | Z
Verschiedenen Typen von Zubehördecodern sind gebräuchlich
- Magnetartikeldecoder (oft vereinfach als Weichendecoder bezeichnet)
- Schaltdecoder
- Servodecoder
- Drehscheibendecoder
- sonstige Anwendungen (z.B. Auslösen von Sound wie beim EasySound maxi)
Sie können allerdings auch so konzipiert sein, dass sie nicht nur eine spezifische Aufgabe erfüllen, sondern verschiedene Decodertypen in sich vereinen. Der Einsatz dieser Kombi-Decoder ist vorteilhaft, wenn
- verschiedene Schaltvorgänge gleichzeitig oder abhängig voneinander ausgeführt werden sollen (z.B. Weichen mit Herzstück schalten) oder
- um den Verkabelungsaufwand zu reduzieren und benachbarte (unterschiedliche) Komponenten gemeinsam über einen Decoder anzusteuern.
Die "richtigen" technischen Werte
Um es vorweg zu nehmen: Wie gut der Sound Ihrer Lok am Ende ist, hängt von mehr Faktoren als den technischen Werten des verbauten Lautsprechers ab. Trotzdem ist ein Blick auf die technischen Daten hilfreich, wenn es darum geht, eine passende Lösung für ein Projekt zu finden.
Abmessungen: möglichst groß
- In der Regel steigen Belastbarkeit, Lautstärke und Übertragungsbereich mit der Größe des Lautsprechers, oder kurz formuliert: Die Wiedergabequalität steigt meistens mit der Größe des Lautsprechers.
- Daraus resultiert unser Tipp: Wählen Sie für den Einbau in ein Fahrzeug einen möglichst großen Lautsprecher wählen.
Belastbarkeit [W]
- Gibt die Leistung an, die der Lautsprecher "vertragen" kann. Liefert der Soundbaustein mehr, kann der Lautsprecher beschädigt werden.
- Nenn-Belastbartkeit (auch als nominale Leistung bezeichnet) ist die Leistung, die der Lautsprecher über einen langen Zeitraum aushält (laut Norm 100 Stunden).
- Die maximale Belastbarkeit liegt bei den meisten Lautsprechern ca. 50 % höher als die Nenn-Leistung.
Impedanz [Ohm]
Die Impedanz beschreibt den akustischen Widerstand, der der Schallausbreitung im (freien) Schallfeld entgegengesetzt wird. Die genaue Erklärung ist schon "höhere Akustik" und für den Modellbahner nicht von Bedeutung. Es reicht völlig aus, bei der Auswahl des Lautsprechers für einen Soundbaustein Folgendes zu beachten:
Lautstärke [dB]
Eine Verringerung der Lautstärke ist immer möglich, entweder
- durch Einstellung des Lautsprecherausgangs des Soundbausteins
- oder (wenn der Soundbaustein keine Einstellung der Lautstärke ermöglicht): durch Einbau eines Vorwiderstands in der Zuleitung zum Lautsprecher (max. 10 Ohm)
Übertragungsbereich [Hz]
- Je niedriger der untere Wert ist, desto besser werden tiefe Töne widergegeben - was z.B. bei Dampflokgeräuschen wichtig ist.
- Bauartbedingt können Kleinst-Lautsprecher Töne mit niedrigen Frequenzen nicht wiedergeben.
- Hohe Töne über 15.000 Hz hören Erwachsene i.d.R. nicht.
>>> Lokdecoder LD-G-36 plus | Soundmodul Micro X3
In speziellen ICs auf dem Lokdecoder LD-G-36 plus und dem Soundmodul Micro X3 werden Originalgeräusche eines bestimmten Fahrzeugtyps gespeichert (Dampflok, Diesellok, E-Lok oder mehr als 150 individuelle Fahrzeugtypen). Es handelt sich um Aufnahmen von Original-Geräuschen der entsprechenden Vorbildfahrzeuge. Mit einem speziellem Programmiergerät (Tams Sound Programmer, Art.-Nr. 70-03200) ist es möglich, die Programmierung des Decoders zu ändern.
Über die Funktionstasten der Digitalzentrale können die verschiedenen Geräusche (Stand- und Fahrgeräusch, Signalhorn oder Lokpfeife, Entkupplungs- oder Türschließgeräusch, Glocke oder zweites Signalhorn) abgerufen werden. Die Fahrgeräusche sind geschwindigkeitsabhängig. Über einen Taktgeber (Hall-Sensor oder Reedkontakt in Kombination mit einem Magneten) kann z.B. der Auspuffschlag von Dampfloks radsynchron gesteuert werden.
Die werksmäßigen Voreinstellungen können durch Änderung der Konfigurationsvariablen angepasst werden. Einstellmöglichkeiten:
- Lautstärke
- Auspuffschlag von Dampfloks
- Länge der Pausen zwischen Signaltönen
- Auslöseschwellen bei Motorlaständerung, für Bremsgeräusch und für Lüftergeräusch von E-Loks
- Faderzeit (= Dauer des Ein- und Ausblendens beim Ein- und Ausschalten)
- Empfindlichkeit bei Laständerungen und Leerlaufzeit
- Zuordnung der Geräusche zu den Funktionstasten
Analoge Anlagen:
Über eine externe Steuerung kann in analogen Anlagen der automatische Pendelbetrieb zwischen zwei Endbahnhöfen gesteuert werden. Da der Richtungswechsel in Gleich- und Wechselstromanlagen auf verschiedene Weise ausgeführt wird, sind die Steuermodule entweder für den Einsatz in 2- oder 3-Leiter-Anlagen geeignet.
Digitale Anlagen:
Der Einsatz eines externen Steuermoduls (vergleichbar mit einer Pendelzugsteuerung für analoge Anlagen) ist in digitalen Anlagen nicht möglich, da dann widersprüchliche Befehle hinsichtlich Fahrtrichtung oder Geschwindigkeit von der Digitalzentrale und der Pendelzugsteuerung gesendet würden. Zur Realisierung eines Pendelzugbetriebes in digitalen Anlagen gibt es folgende Lösungen:
- Abtrennen der Pendelstrecke von der Digitalsteuerung und Ansteuerung mit einer Pendelzugsteuerung für analoge Anlagen.
- Konfiguration einer Pendelautomatik in der Digitalzentrale (sofern die Zentrale das ermöglicht) in Kombination mit digitalen Rückmeldern (z.B. s88) an der Pendelstrecke.
- Einsatz eines Lokdecoders mit Pendelautomatik (z.B. Lokdecoder der Serie 30 plus).
Unsymmetrische
Gleisspannung an der
ABC-Bremsstrecke
Unsymmetrische
Gleisspannung an der
ABC-Bremsstreck
>>> Digitalsteuerung
Das Digitalformat ist die "Sprache", in der die Digitalzentrale ihre Befehle an die Decoder sendet. Seit dem Beginn der Digitalisierung in den 1980er Jahren wurden verschiedene Formate entwickelt. Davon sind heute die folgenden Formate gebräuchlich:
DCC (Digital Command Control):
Für das ursprünglich von der Firma Lenz entwickelte Datenformat wurden bereits in den 1980er Jahren unter Federführung der NMRA (der US-amerikanischen National Model Railroad Association) von europäischen und nordamerikanischen Modellbahn-Herstellern Standards festgelegt. Heute werden für Europa die Standards von der RailCommunity (dem Verband der Hersteller Digitaler Modellbahnprodukte e.V.) gepflegt und weiterentwickelt. DCC-Digitalkomponenten werden heute von sehr vielen Herstellern für alle Nenngrößen angeboten.
Motorola (I und II):
Das Format wurde 1985 von Märklin entwickelt und wurde bis zur Einführung von mfx im Jahr 2005 für die Digitalkomponenten von Märklin verwendet. Wegen der großen Verbreitung von Märklin-Digitalkomponenten aus der Zeit vor 2005 ist das Format noch immer vielfach in Gebrauch.
mfx, M3 und M4:
2005 stellte Märklin mfx als Nachfolger für das veraltete und nicht mehr entwicklungsfähige Motorola-Format vor. Aus rechtlichen Gründen konnten zunächst nur wenige Hersteller (Märklin und ESU) Komponenten anbieten, die die Möglichkeiten des Formats ausnutzten (d.h. einschließlich automatischer Anmeldung durch die Fahrzeugdecoder). ESU entwickelt das Format mittlerweile eigenständig unter der Bezeichnung M4 weiter.
Wir haben für unser Digitalsystem EasyControl das Format M3 entwickelt, mit dem es möglich ist, mfx-Fahrzeug-Decoder anzusteuern. Die automatische Anmeldung ist mit EasyControl nicht möglich.
2019 hat Märklin das Protokoll offengelegt und anderen Herstellern die Nutzung ermöglicht. Wir werden voraussichtlich ab 2021 mfx-Decoder anbieten. Weitere Informationen zu mfx...
Im Gegensatz zu anderen Digitalprotokollen sind für das mfx-Protokoll derzeit keine Befehle zur Ansteuerung von Zubehördecodern definiert (Stand:10/2019). Stationäre Decodern werden daher entweder im Motorola- oder im DCC-Format geschaltet.
Selectrix:
Das Format wurde ursprünglich von der Firma Trix entwickelt und unterscheidet sich technisch grundlegend von anderen Digitalformaten. Da es für dieses Format bereits frühzeitig Fahrzeugdecoder mit kleinen Abmessungen gab, wurde es vor allem für Modellbahnen der Nenngröße N eingesetzt. Für das Format gibt es nur wenige Anbieter. Da wir keine Komponenten für dieses Format anbieten und nur selten Selectix gemeinsam mit anderen Digitalformaten zum Einsatz kommt, gehen wir in unseren Informationen nicht näher auf dieses Format ein.
Die meisten Digitalprodukte aus unserem Lieferprogramm sind multiprotokollfähig, sie senden bzw. "verstehen" die beiden am weitesten verbreiteten Digitalformate: das DCC- und das Motorola- (kurz: MM) Format. Im Betrieb erkennen unsere Fahrzeugdecoder automatisch, in welchem Format sie angesteuert werden.
>>> Lokdecoder, Funktionsdecoder
Unsere Fahrzeugdecoder (außer Mini-Decodern) haben spezielle Anschlüsse für zusätzliche, externe Stützelkos. Die Stützelkos versorgen die Decoder in Abschnitten mit schlechtem Kontakt zu den Schienen (z.B. an Weichen oder Schmutzstellen) mit Strom und verhindern so z.B. flackernde Beleuchtungen.
Bei der Auswahl des Stützelkos müssen Sie die in den technischen Daten des Decoders angegebene Mindest-Spannungsfestigkeit sowie die Grenzwerte der Kapazität beachten. Wenn Sie Stützelkos mit einer höheren Kapazität einsetzen wollen, benötigen Sie eine zusätzliche Ladeschaltung.
Tipp: Ladeschaltung
>>> Fahrzeug-Decoder , Zubehördecoder
Fahrzeugdecoder
Unsere Multiprotokoll-Fahrzeugdecoder können mit DCC-Zentralen über Konfigurationsvariablen (kurz CV) oder mit Motorola-Zentralen über Register programmiert werden. Jeder CV bzw. jedem Register wird dabei ein Zahlenwert zugeordnet. Bei allen Decodern ist im DCC-Format die Programmierung auf dem Programmiergleis (Direct Programming) und die Hauptgleisprogrammieung (POM = Programming on Main) möglich.
Direct Programming: Um Lok- oder Funktionsdecoder für das DCC-Format auszulesen oder zu programmieren, werden sie auf das Programmiergleis gestellt, das an einen speziellen Ausgang der Digitalzentrale angeschlossen ist. Als Programmiergleis ist jedes handelsübliche Gleisstück geeignet.
PoM (Programming on main oder Hauptgleis-Programmierung): Diese Variante der Programmierung für das DCC-Format ermöglicht es, Fahrzeugdecoder direkt auf der Anlage zu programmieren (anstatt die Fahrzeuge auf ein spezielles Programmiergleis zu setzen). Vorteil dieser Lösung ist z.B., dass alle Änderungen, die das Fahrverhalten beeinflussen, unmittelbar geprüft werden können.
Registerprogrammierung für das DCC-Format: Diese Art der Programmierung wird nur noch von einigen älteren Zentralen verwendet. Einige unserer Decoder unterstützen auch diese Art der Programmierung.
Programmierung mit Zentralen mit beschränkten Eingabewerten: Durch Verwendung von Hilfsregistern können viele Decoder auch mit Zentralen, die lediglich Eingabewerte bis 80 oder 99 zulassen, in vollem Umfang programmiert werden.
Zubehördecoder
Grundlage für die Vergabe der Adressen ist ist ein 4-fach-Zubehördecoder, der 4 Ausgangspaare (z.B. Weichen) schaltet. Daraus resultiert, dass jeder Decoderadresse vier Weichenadressen mit 4 aufeinanderfolgenden Nummern zugeordnet werden.
Die Programmierung der Adresse eines Zubehördecoders über die (DCC-) Konfigurationsvariablen ist daher etwas Nachdenken, da einer Decoderadresse (z.B. 10) vier Weichenadressen (z.B. 37, 38, 39, 40) zugeordnet werden. Die Tatsache, dass manche Hersteller bei der Nummerierung der Zubehördecoder-Adressen mit "0", andere mit "1" beginnen, macht es darüberhinaus nicht einfacher.
Daher die dringende Empfehlung: Bei vielen Decodern ist es möglich, den Decoder durch Aufrufen einer beliebigen Adresse aus einem 4-er Adressblock "anzulernen", nachdem er zuvor mit einem Taster oder durch Setzen eines Jumpers in den Programmiermodus versetzt wurde. Wenn diese Option vorhanden ist, sollten Sie sie nutzen!
>>> Lokdecoder der Serie 30 plus, Funktionsdecoder FD-R Extended
Die Schalteingänge schalten z.B. zugeordnete Ausgänge, sobald sie mit Decodermasse verbunden werden (z.B. über Reedkontakte oder Hall-Sensoren in Kombination mit Dauermagneten im Gleis). Sie können eingesetzt werden, um Funktionen automatisch auszulösen, z.B.
- das Signalhorn oder den Pfiff an der Tunneleinfahrt,
- die Glocke am Bahnübergang.
Außerdem werden die Schalteingänge verwendet, um eine Pendelzugautomatik einzurichten.
S
>>> DCC-Format, Fahrzeugdecoder
Dieses Verfahren wird eingesetzt, um die Zeit für die Übertragung von Geschwindigkeits-, Richtungs- und Funktionsbefehle an Fahrzeugdecoder im DCC-Format zu reduzieren. Dazu werden
- statt die verschiedenen Befehle jeweils einzeln zu übertragen
- alle Befehle zusammengefasst und in einem einzigen Befehl übertragen.
Vor allem bei Anlagen, auf denen eine größere Zahl von Decodern mit vielen Funktionen zum Einsatz kommt, wirkt sich die Reduzierung der Übertragungszeit positiv aus.
Voraussetzungen für die Nutzung des Verfahrens sind:
- die Verwendung einer Digitalzentrale, die SDF unterstützt
- der Einbau von Fahrzeugdecodern, die SDF unterstützen
- die Einstellung des Fahrstufenmodus 28 / 128 am Decoder.
Duo-LEDs
>>> Modellbahn-Elektronik
Duo-LEDs vereinen zwei verschiedenfarbige LED-Chips in einem Gehäuse und leuchten – je nach Ansteuerung – in der einen oder der anderen Farbe oder auch in einer Mischfarbe.Folgende Typen sind gebräuchlich:
|
3-Bein-LEDs
mit gemeinsamer
Kathode (-)
|
3-Bein
mit gemeinsamer
Anode (+)
-----------------------------------Je nachdem, an welcher Kathode die Spannung anliegt, leuchtet die LED in der einen oder anderen Farbe. Sind beide Kathoden gleichzeitig mit der Spannungsquelle verbunden, entsteht ein Mischlicht. Bei dieser Bauform ist das längste Beinchen die Anode. Diese seit einiger Zeit erhältliche LED-Form kann direkt an die Funktionsausgänge eines Fahrzeugdecoders angeschlossen werden.
|
2-Bein
(bipolar)
-----------------------------------Je nach Polung leuchtet die LED entweder in der einen oder der anderen Farbe. Um ein Mischlicht zu erzeugen, muss die LED mit Wechselspannung angesteuert werden. Durch die verschieden langen Anschlüsse wird gekennzeichnet, welche Farbe bei der einen oder anderen Durchflussrichtung leuchtet. Der Anschluss an die Ausgänge eines Fahrzeugdecoders ist etwas trickreich, da die LED ja nur zwei Anschlüsse hat, die mit drei Decoderanschlüssen verbunden werden müssen.
|
Duo-LEDs
>>> Modellbahn-Elektronik
Duo-LEDs vereinen zwei verschiedenfarbige LED-Chips in einem Gehäuse und leuchten – je nach Ansteuerung – in der einen oder der anderen Farbe oder auch in einer Mischfarbe.Folgende Typen sind gebräuchlich:
|
3-Bein-LEDs
mit gemeinsamer
Kathode (-)
|
3-Bein
mit gemeinsamer
Anode (+)
-----------------------------------Je nachdem, an welcher Kathode die Spannung anliegt, leuchtet die LED in der einen oder anderen Farbe. Sind beide Kathoden gleichzeitig mit der Spannungsquelle verbunden, entsteht ein Mischlicht. Bei dieser Bauform ist das längste Beinchen die Anode. Diese seit einiger Zeit erhältliche LED-Form kann direkt an die Funktionsausgänge eines Fahrzeugdecoders angeschlossen werden.
|
2-Bein
(bipolar)
-----------------------------------Je nach Polung leuchtet die LED entweder in der einen oder der anderen Farbe. Um ein Mischlicht zu erzeugen, muss die LED mit Wechselspannung angesteuert werden. Durch die verschieden langen Anschlüsse wird gekennzeichnet, welche Farbe bei der einen oder anderen Durchflussrichtung leuchtet. Der Anschluss an die Ausgänge eines Fahrzeugdecoders ist etwas trickreich, da die LED ja nur zwei Anschlüsse hat, die mit drei Decoderanschlüssen verbunden werden müssen.
|